【泡泡一分钟】LIPS: 激光雷达-惯性3D平面SLAM(IROS-2018)
每天一分钟,带你读遍机器人顶级会议文章
标题:LIPS: LiDAR-Inertial 3D Plane SLAM
作者:Patrick Geneva, Kevin Eckenhoff, Eric Westman, Yulin Yang, and Guoquan Huang
来源:International Conference on Intelligent Robots and Systems (IROS 2018)
编译:倪志鹏
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权。

摘要

本文提出了基于最近点的平面表示方法,并分析了其在3D室内同时定位和建图中(SLAM)的应用效果。
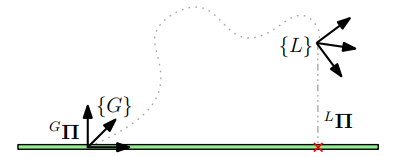
图1 上图中G帧的最近点平面表达是具有奇异性的,因为其投影中心就在平面上;L帧的定义是合理的,在该帧下用红×点表示该平面。
本文使用了无奇异性的平面因子进行优化,并在图优化框架与惯导融合。最后,本文将提出的LIPS系统分别在LiDAR模拟器中和现实环境中进行了实验。
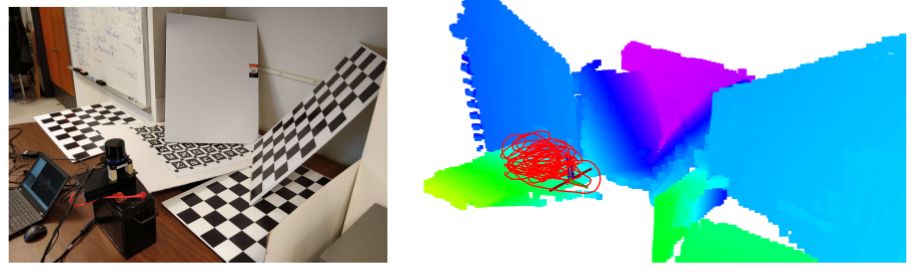
图2 上图为操作的实验环境(左)和平面的重建深度图(右)。

Abstract
This paper presents the formalization of the closest point plane representation and an analysis of its incorporation in 3D indoor simultaneous localization and mapping (SLAM).
We present a singularity free plane factor leveraging the closest point plane representation, and demonstrate its fusion with inertial preintegratation measurements in a graph-based optimization framework.
The resulting LiDAR-inertial 3D plane SLAM (LIPS) system is validated both on a custom made LiDAR simulator and on a real-world experiment.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





