【泡泡一分钟】变化环境下激光地图辅助视觉惯性定位
每天一分钟,带你读遍机器人顶级会议文章
标题:Laser Map Aided Visual Inertial Localization in Changing Environment
作者:Xiaqing Ding, Yue Wang, Dongxuan Li, Li Tang, Huan Yin, Rong Xiong
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:章绩伟
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

室外环境中的长期视觉定位是一个具有挑战性的问题,尤其是面临跨季节,双向任务和动态场景环境。在本文中,我们提出了一种新颖的视觉惯性定位框架,该框架针对LiDAR构建的地图进行了定位。基于激光图的几何信息,提出了一种混合BA框架,该框架可以估计摄像机相对于现有激光图的姿态,同时优化在线视觉惯性里程计的状态变量。为了更准确地进行交叉模式数据关联,使用多会话激光和视觉数据优化激光图,以提取用于视觉定位的显着且稳定的子集。为了验证所提方法的效率,我们在不同季节,沿着相同和相反方向的路线收集校园南部的数据。在所有定位数据中,我们提出的方法给出了令人满意的结果,并显示了混合BA和地图优化的优越性。

图1 激光地图辅助视觉惯性定位在变化的环境中。地图是在阳光明媚的春天使用LiDAR建造的,不同颜色的线条是不同季节的不同场景的定位轨迹。这五张照片显示了在定位过程中的一些具有挑战性的情况,包括动态,半静态物体和积雪景观

图2 激光点云地图辅助视觉惯性定位框架
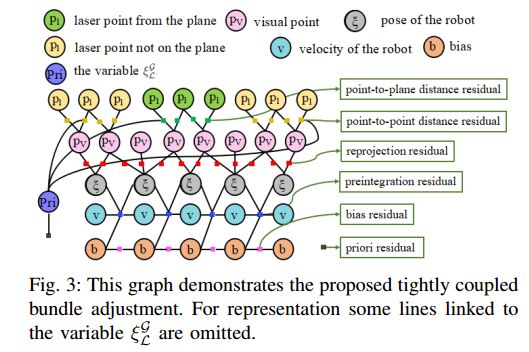
图3 该图表演示了所提出的紧耦合束调整。为了清楚表达,省略了与变量ξ链接的一些行
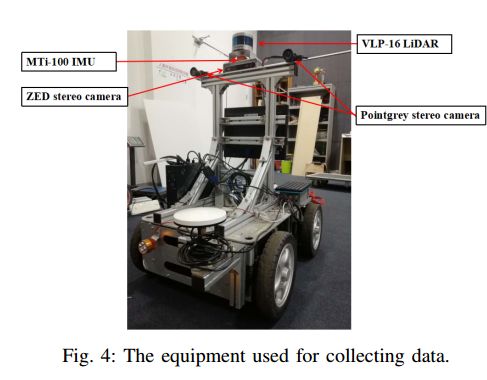
图4 用于收集数据的设备
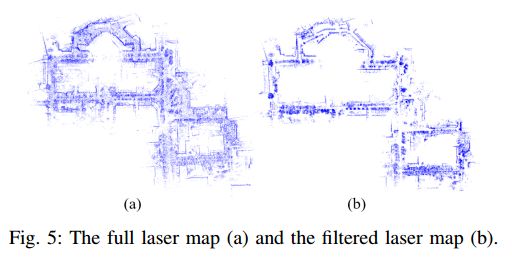
图5 完整激光图(a)和滤波激光图(b)

图6 YQ South数据集中的横向和航向误差的定位轨迹和直方图。黑色十字表示轨迹的开始,箭头表示轨迹的方向。第一列中的图片显示了在第二列中用红色矩形标记的位置处的不同会话中观察到的视图

Abstract
Long-term visual localization in outdoor environment is a challenging problem, especially faced with the cross-seasonal, bi-directional tasks and changing environment. In this paper we propose a novel visual inertial localization framework that localizes against the LiDAR-built map. Based on the geometry information of the laser map, a hybrid bundle adjustment framework is proposed, which estimates the poses of the cameras with respect to the prior laser map as well as optimizes the state variables of the online visual inertial odometry system simultaneously. For more accurate crossmodal data association, the laser map is optimized using multisession laser and visual data to extract the salient and stable subset for visual localization. To validate the efficiency of the proposed method, we collect data in south part of our campus in different seasons, along the same and opposite-direction route. In all sessions of localization data, our proposed method gives satisfactory results, and shows the superiority of the hybrid bundle adjustment and map optimization
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:67pu
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



