【泡泡一分钟】基于全局SFM的鲁棒初始化单目视觉SLAM(3DV-1)
每天一分钟,带你读遍机器人顶级会议文章
标题:GSLAM: Initialization-robust Monocular Visual SLAM via Global Structure-from-Motion
作者:Chengzhou Tang , Oliver Wang , Ping Tan
来源:3DV 2017
编译:蔡纪源
播音员:王肃
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

今天介绍的文章是“GSLAM: Initialization-robust Monocular Visual SLAM via Global Structure-from-Motion”——基于全局SFM的鲁棒初始化单目视觉SLAM,该文章发表在3DV2017。
许多单目视觉SLAM算法由增量式structure-from-motion(Incremental SFM,ISFM)方法衍生而来。本文工作提出了一个新的结合目前全局SFM最新研究的单目SLAM方法。

本文包含两个主要贡献。首先,作者用新的rank-1矩阵分解技术解决视觉里程计问题(经典的分解方法只针对正交变换或仿射变换的相机,作者的方法适用于透视变换的相机且无需知道投影变换中的深度信息),对于地图初始化造成的误差也更为鲁棒。其次,作者采用最新的全局SfM方法来处理Pose图最优化,得到多阶段的线性模型,同时能使L1优化对错误的闭环检测结果更为鲁棒。结合这两种方法,使得提出的方法可以得到更鲁棒的重建效果,而且速度明显比目前最先进的SLAM方法快(4倍,见下表)。
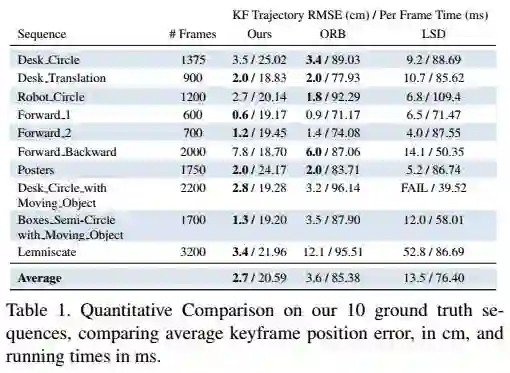
为了更好的研究比较,作者做了一个新的数据集(用Vicon设备记录相机的真实运动,部分图像序列见下图),并在上面将提出的方法与目前的流行方法进行比较测评,建立基准数据集。

大牛简介:谭平教授是360人工智能研究院副院长,加拿大Simon Fraser大学终身教授,是Structure-from-Motion、SLAM、Image-based-Modeling等领域的大牛,如果您对前辈的工作感兴趣,请转至链接 http://www.cs.sfu.ca/~pingtan/publication.htm
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
回复关键字“GSLAM”,即可获取本文下载链接。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



