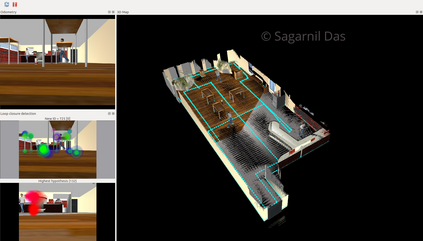
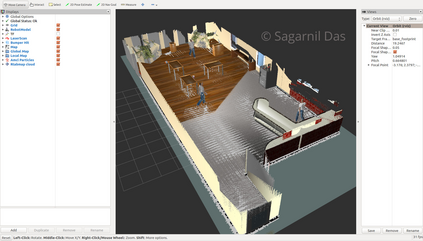
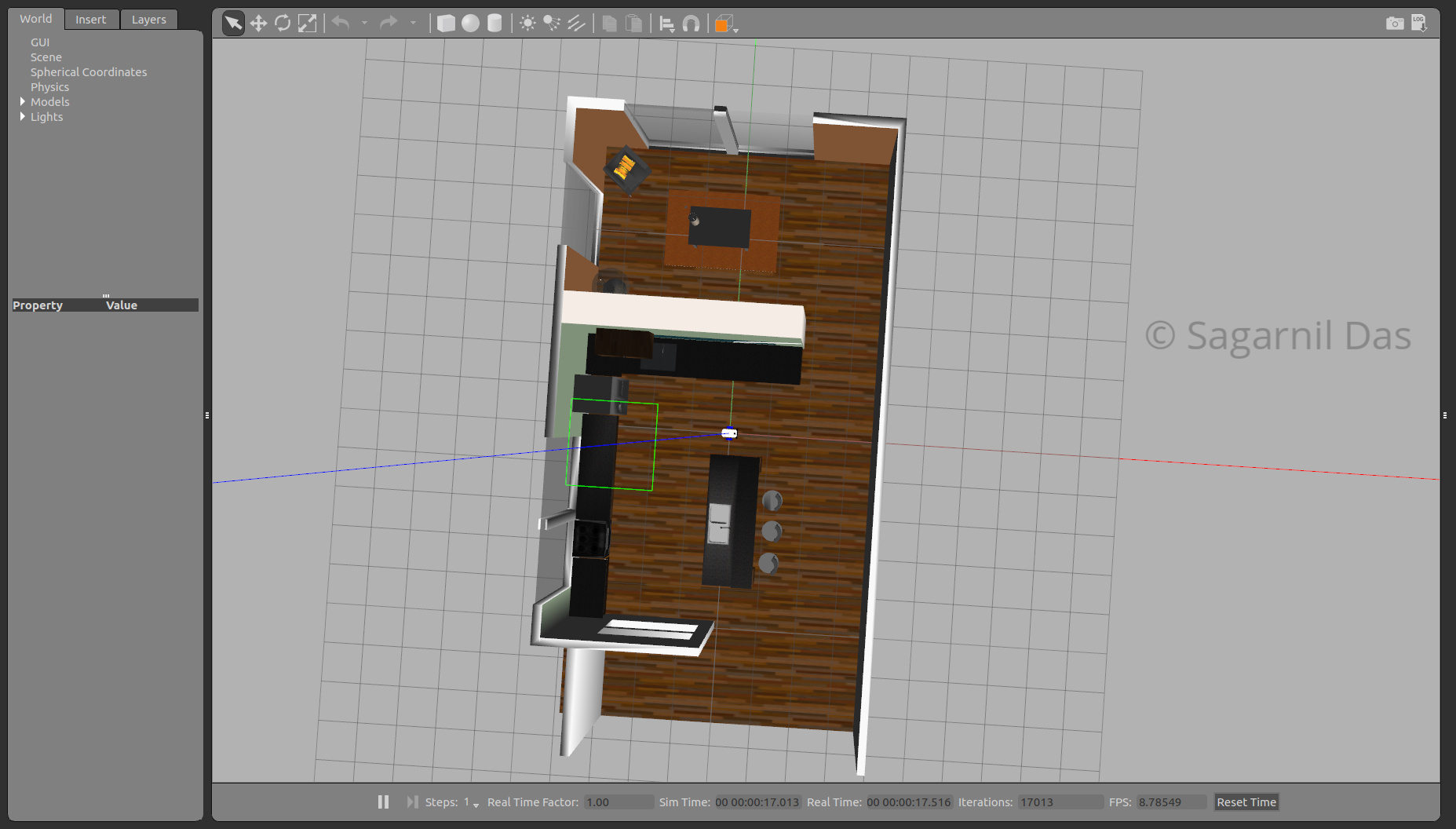
This paper implements Simultaneous Localization and Mapping (SLAM) technique to construct a map of a given environment. A Real Time Appearance Based Mapping (RTAB-Map) approach was taken for accomplishing this task. Initially, a 2d occupancy grid and 3d octomap was created from a provided simulated environment. Next, a personal simulated environment was created for mapping as well. In this appearance based method, a process called Loop Closure is used to determine whether a robot has seen a location before or not. In this paper, it is seen that RTAB-Map is optimized for large scale and long term SLAM by using multiple strategies to allow for loop closure to be done in real time and the results depict that it can be an excellent solution for SLAM to develop robots that can map an environment in both 2d and 3d.
翻译:本文采用了同步定位和绘图技术( SLAM) 构建给定环境的地图。 为了完成这项任务,采用了实时外观绘图(RTAB-Map) 方法。 最初, 由提供模拟环境创建了 2 位占用网格 和 3 位 octomap 。 其次, 也为绘图创建了个人模拟环境 。 在这种外观方法中, 使用名为 Loop 关闭 的程序来确定机器人是否在之前看到过某个位置 。 本文显示, RTAB- Map 是大规模和长期优化的, 使用多种战略允许实时环封闭, 结果显示它可以成为SLAM 开发机器人的极好解决方案, 可以同时在 2d 和 3d 绘制环境的地图 。