【泡泡一分钟】用于平面环境的线性RGBD-SLAM
每天一分钟,带你读遍机器人顶级会议文章
标题:Linear RGB-D SLAM for Planar Environments
作者:Pyojin Kim, Brian Coltin, and H. Jin Kim
来源:ECCV2018
编译:章绩伟
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文提出了一种新的公式,用于将正交平面特征作为全局模型包含在基于连续贝叶斯过滤的线性SLAM方法中。先前的平面SLAM算法在姿态图优化中估计相机姿态和多个界标平面。然而,由于它被公式化为高维度非线性优化问题,因此不能保证算法会收敛到全局最优。为了克服这些限制, 我们提出了一种新的SLAM方法。该方法在线性卡尔曼滤波器框架内联合估计地图中的摄像机位置和平面地标。旋转使SLAM问题高度非线性。因此,我们使用曼哈顿世界(MW)中的结构规律来解决相机的旋转运动,从而产生线性SLAM方法。我们在标准RGB-D基准测试以及其他大型室内环境中测试了本文提出的算法,该算法展示出了与其他最先进的SLAM方法相当的性能并且无需使用高代价的非线性优化方式。
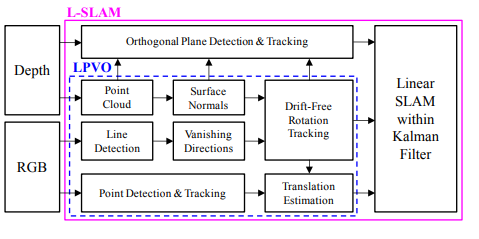
图1 本文算法的框架

Abstract
We propose a new formulation for including orthogonal planar features as a global model into a linear SLAM approach based on sequential Bayesian filtering. Previous planar SLAM algorithms estimate the camera poses and multiple landmark planes in a pose graph optimization. However, since it is formulated as a high dimensional nonlinear optimization problem, there is no guarantee the algorithm will converge to the global optimum. To overcome these limitations, we present a new SLAM method that jointly estimates camera position and planar landmarks in the map within a linear Kalman filter framework. It is rotations that make the SLAM problem highly nonlinear. Therefore, we solve for the rotational motion of the camera using structural regularities in the Manhattan world (MW), resulting in a linear SLAM formulation. We test our algorithm on standard RGB-D benchmarks as well as additional large indoor environments, demonstrating comparable performance to other state-of-the-art SLAM methods without the use of expensive nonlinear optimization.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



