
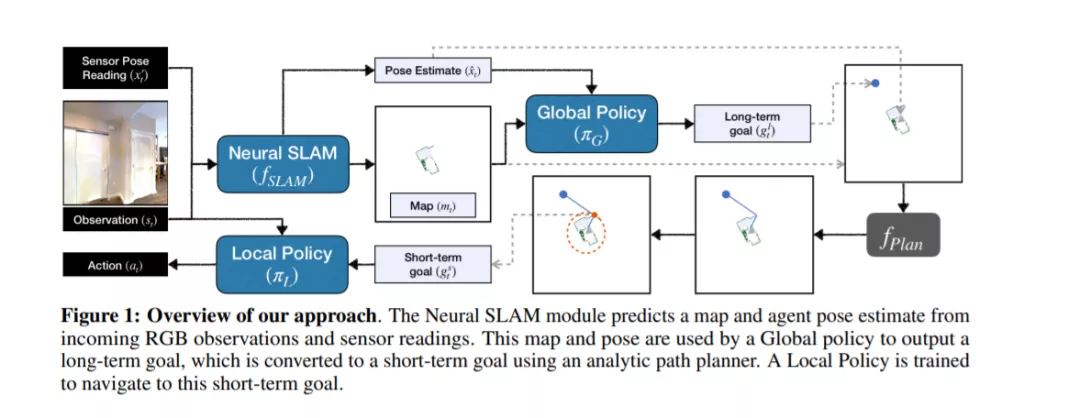
这项工作提出了一种模块化和层次化的方法来学习探索3D环境的策略,称为“主动神经SLAM”。我们的方法利用了经典方法和基于学习的方法的优势,通过使用带学习SLAM模块的分析路径规划器,以及全球和本地策略。学习的使用提供了输入模式方面的灵活性(在SLAM模块中),利用了世界的结构规则(在全局策略中),并提供了对状态估计错误的健壮性(在局部策略中)。在每个模块中使用这种学习方法保留了它的优点,同时,分层分解和模块化训练允许我们避开与端到端训练策略相关的高样本复杂性。我们的实验在视觉和物理仿真三维环境证明了我们的方法的有效性超过过去的学习和基于几何的方法。该模型也可以很容易地转移到点目标任务,并且是CVPR 2019 Habitat PointGoal Navigation挑战的获奖作品。
成为VIP会员查看完整内容
相关内容
专知会员服务
31+阅读 · 2020年3月11日
专知会员服务
78+阅读 · 2020年3月1日
Arxiv
4+阅读 · 2018年9月6日

相关VIP内容
专知会员服务
31+阅读 · 2020年3月11日
专知会员服务
78+阅读 · 2020年3月1日
相关资讯
相关论文
Arxiv
4+阅读 · 2018年9月6日