【泡泡一分钟】CVI-SLAM –协同视觉惯性SLAM
每天一分钟,带你读遍机器人顶级会议文章
标题:CVI-SLAM – Collaborative Visual-Inertial SLAM
作者:Marco Karrer, Patrik Schmuck, Margarita Chli
来源:International Conference on Intelligent Robots and Systems (IROS 2018)
编译:张建
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

在机器人准备好用于实际任务之前,机器人感知构成了最大的障碍,在多代理、协作任务中,更高效和鲁棒的机器人感知的前景可以极大地影响许多机器人应用。
本文利用每个代理上普遍存在的、良好建立的视觉惯性设置,提出了一种用于集中式协作SLAM的视觉惯性框架CVI-SLAM。
与中央服务器共享所有信息,每个代理将计算昂贵的任务外包,例如全局地图优化,以释放在线资源,并将测量结果传递给其他参与的代理,同时在线运行视觉惯性里程计以确保整个任务的自主性。
通过对CVI-SLAM的深入分析,证明了其准确性以及协作带来的改进,并从参与代理的数量和网络需求的角度评价了CVI-SLAM的可扩展性。
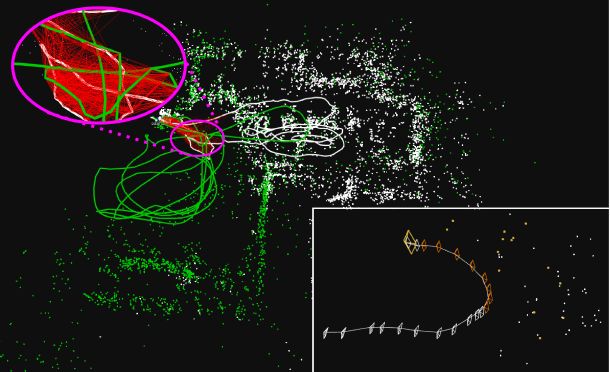
图1:两个代理协作构建地图的CVI-SLAM快照。对于代理1和2,轨迹和地图点分别用白色和绿色着色。不同的代理之间的共视性约束用红色表示。右下角的嵌入描绘了代理1的有限局部地图,其中最新的帧及其观测到的地图点用黄色着色,以及接收来自服务器的姿态更新的关键帧用橙色表示。
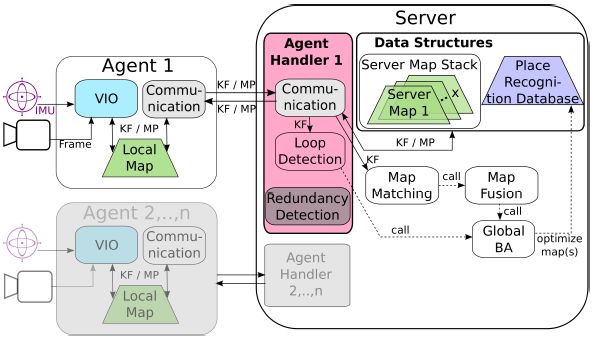
图2:CVI-SLAM系统体系结构概述。代理运行实时视觉惯性测距(VIO)维护一个局部地图。通信接口用于在代理和服务器之间交换关键帧(KF)和地图点(MP)。服务器是一台功能强大的计算机,运行计算昂贵和非时间关键任务:冗余检测、回环检测、地图融合和集束调整(BA)。

图3:描述帧跟踪(左)和局部集束调整(LBA)中的局部优化所涉及的变量的示意图,其中M个KF的本地窗口在代理上运行(右)。虽然跟踪只考虑来自相同代理的最新N个KF,但LBA也可以包括来自其他代理的KF。

Abstract
With robotic perception constituting the biggest impediment before robots are ready for employment in real missions, the promise of more efficient and robust robotic perception in multi-agent, collaborative missions can have a great impact many robotic applications. Employing a ubiquitous and well-established visual-inertial setup onboard each agent, in this paper we propose CVI-SLAM, a novel visualinertial framework for centralized collaborative SLAM. Sharing all information with a central server, each agent outsources computationally expensive tasks, such as global map optimization to relieve onboard resources and passes on measurements to other participating agents, while running visual-inertial odometry onboard to ensure autonomy throughout the mission. Thoroughly analyzing CVI-SLAM, we attest to its accuracy and the improvements arising from collaboration, and evaluate its scalability in the number of participating agents and applicability in terms of network requirements.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





