
题目: PointGroup: Dual-Set Point Grouping for 3D Instance Segmentation
摘要:
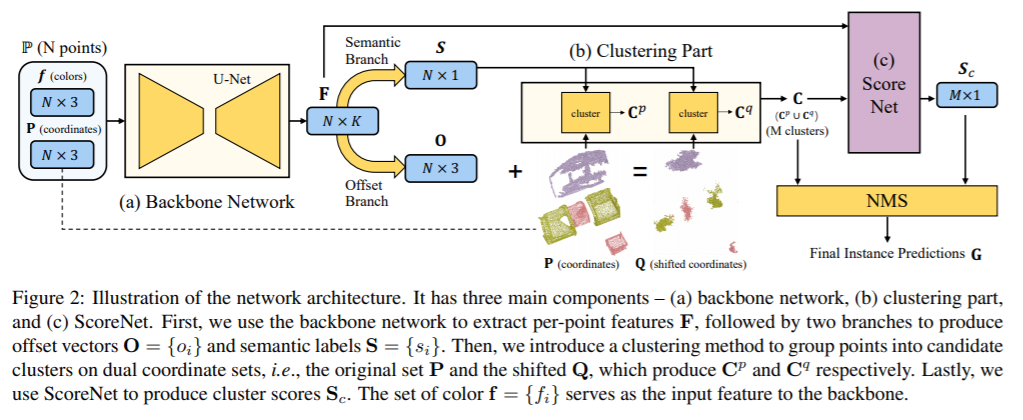
实例分割是场景理解的一项重要工作。与成熟的二维、三维实例分割方法相比,点云的实例分割方法还有很大的改进空间。在本文中,我们提出了PointGroup,这是一种新的端到端自底向上的体系结构,专门关注通过探索对象之间的空隙来更好地分组点。我们设计了一个两分支网络来提取点特征并预测语义标签和偏移量,以便将每个点移动到其各自的实例形心。利用原始点坐标集和偏移点坐标集的互补优势,采用聚类方法进行聚类。此外,我们用记分网来评估候选实例,然后使用非最大抑制(Non-Maximum Suppression, NMS)来删除重复的实例。我们在两个具有挑战性的数据集,ScanNet v2和S3DIS上进行了大量的实验,我们的方法取得了最高的性能,分别为63.6%和64.0%,而在IoU阈值为0.5的mAP方面,以前的最佳解决方案分别为54.9%和54.4%。
成为VIP会员查看完整内容
相关内容

专知会员服务
44+阅读 · 2020年3月26日
专知会员服务
39+阅读 · 2020年3月19日
专知会员服务
36+阅读 · 2020年3月12日
Arxiv
5+阅读 · 2018年9月6日
Arxiv
3+阅读 · 2017年12月28日

相关VIP内容
专知会员服务
44+阅读 · 2020年3月26日
专知会员服务
39+阅读 · 2020年3月19日
专知会员服务
36+阅读 · 2020年3月12日
相关资讯
相关论文
Arxiv
5+阅读 · 2018年9月6日
Arxiv
3+阅读 · 2017年12月28日