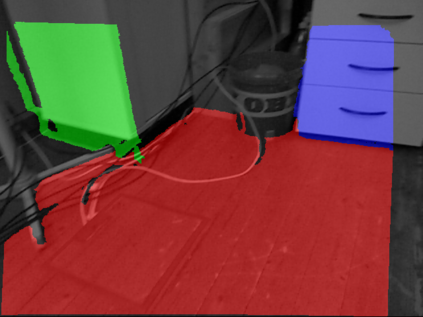
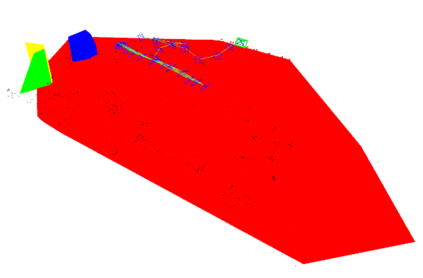
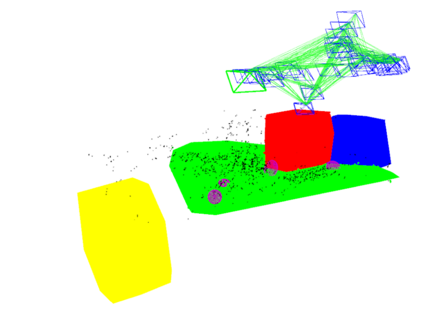
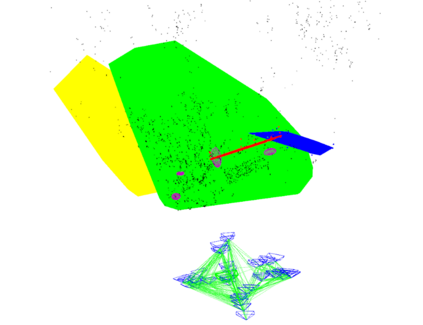
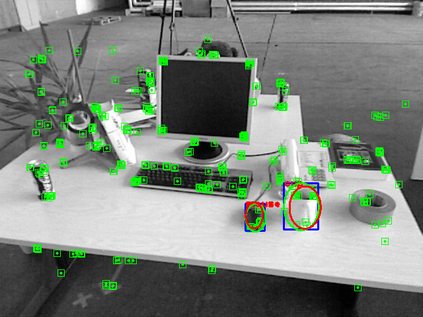
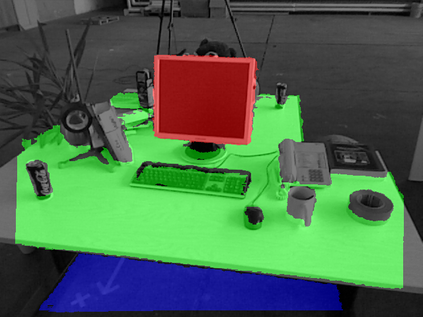
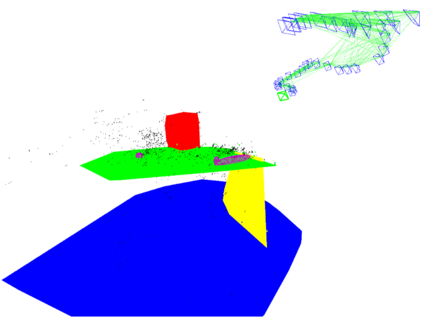
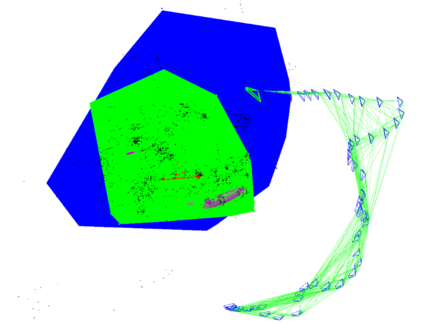
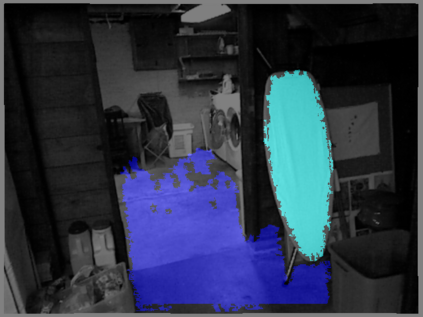
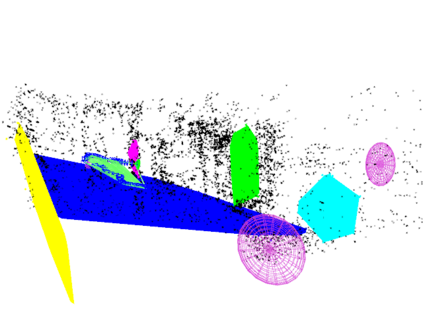
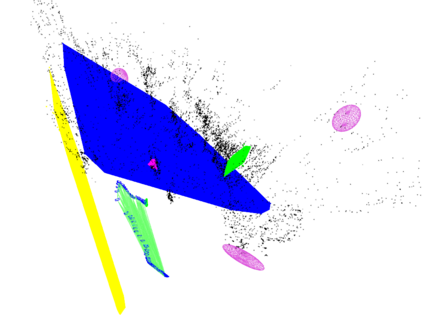
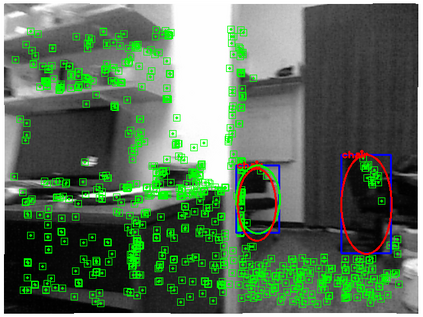
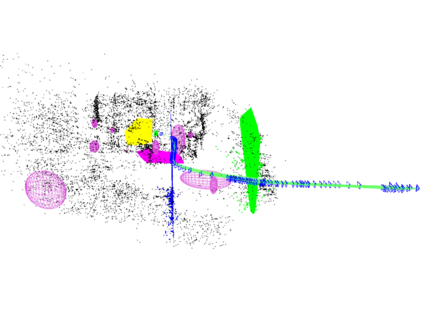
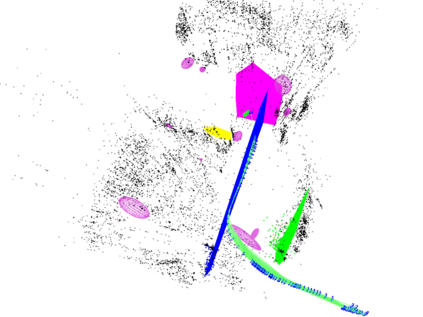
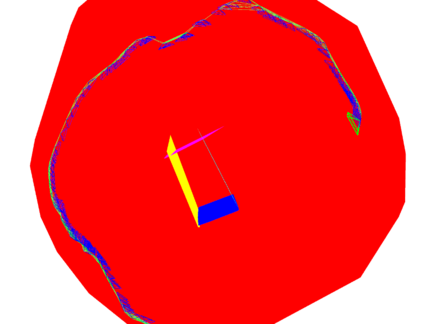
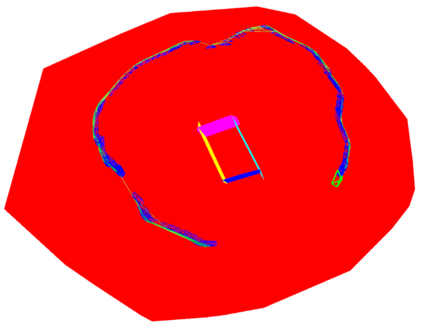
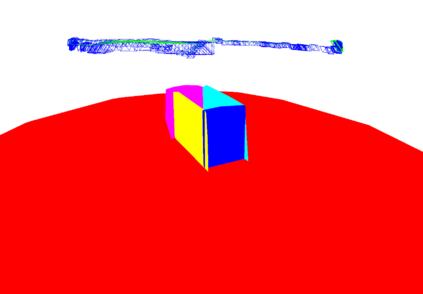
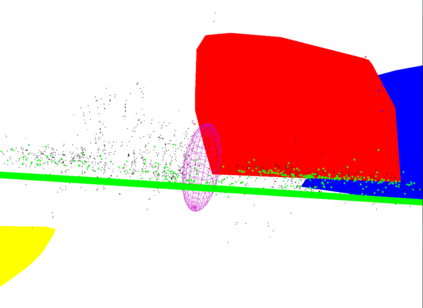
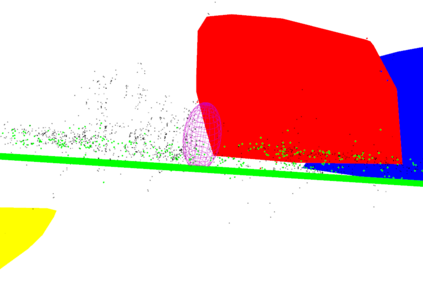
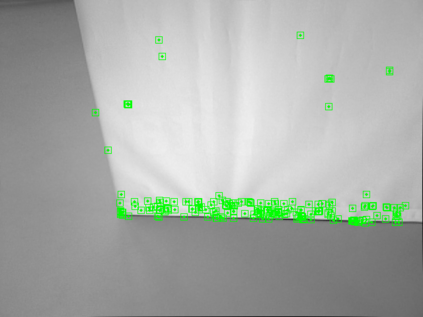
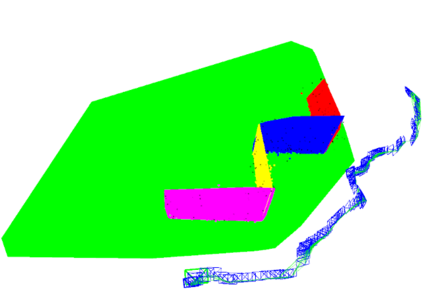
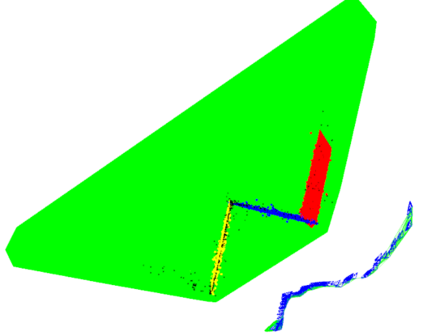
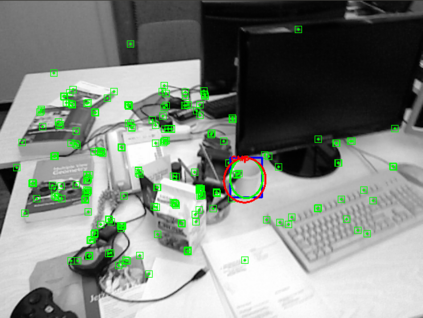
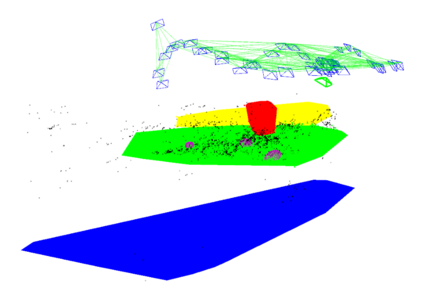
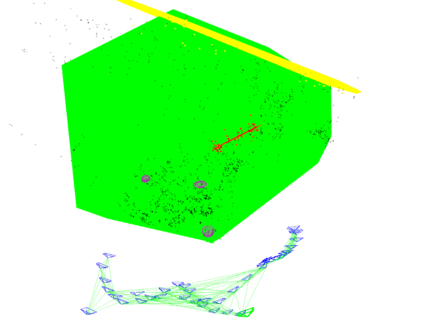
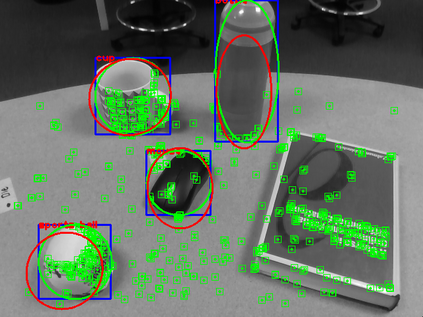
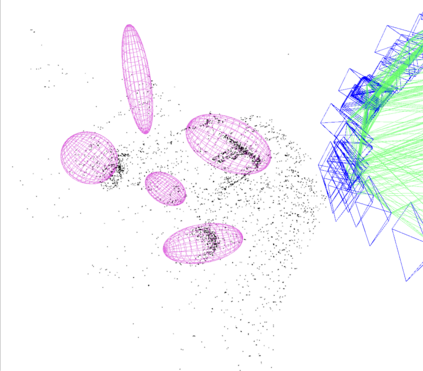
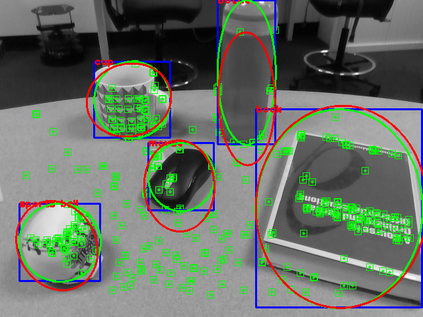
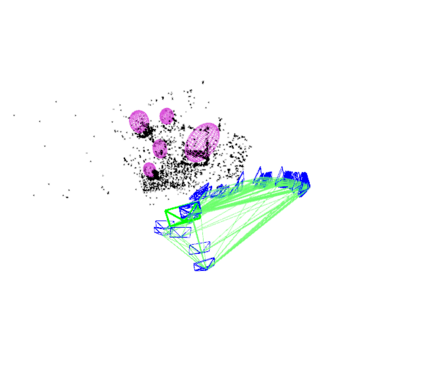
Simultaneous Localization And Mapping (SLAM) is a fundamental problem in mobile robotics. While point-based SLAM methods provide accurate camera localization, the generated maps lack semantic information. On the other hand, state of the art object detection methods provide rich information about entities present in the scene from a single image. This work marries the two and proposes a method for representing generic objects as quadrics which allows object detections to be seamlessly integrated in a SLAM framework. For scene coverage, additional dominant planar structures are modeled as infinite planes. Experiments show that the proposed points-planes-quadrics representation can easily incorporate Manhattan and object affordance constraints, greatly improving camera localization and leading to semantically meaningful maps. The performance of our SLAM system is demonstrated in https://youtu.be/dR-rB9keF8M .
翻译:同步本地化和绘图(SLAM)是移动机器人中的一个基本问题。 点基SLAM方法提供了准确的相机定位, 生成的地图缺乏语义信息。 另一方面, 最先进的物体探测方法从单一图像中提供了现场实体的丰富信息。 这项工作将两者结合在一起, 并提出了一种方法, 将通用物体表示为四分法, 使天体探测能够无缝地纳入SLAM框架 。 关于现场覆盖, 更多的占支配地位平面结构被建为无限平面。 实验显示, 拟议的点平面- 方形结构可以很容易地包含曼哈顿和物体承受能力限制, 大大改进相机定位, 并导致具有语义意义的地图。 我们的SLAM系统的性能在 https://youtu.be/dR-rB9keF8M中展示。