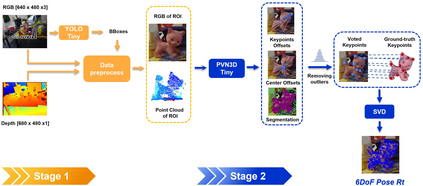
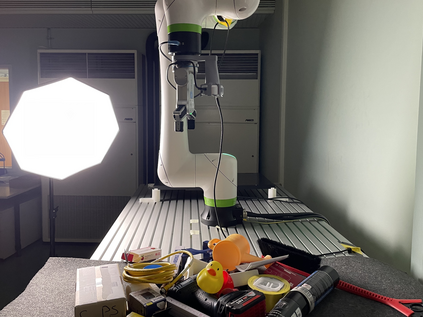
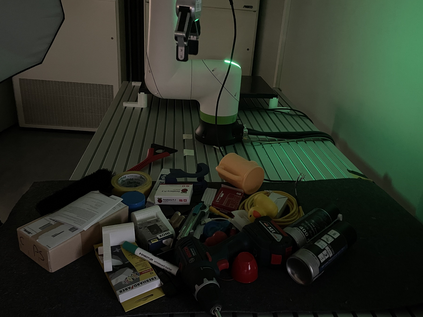
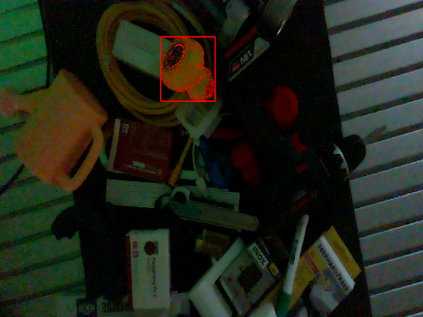
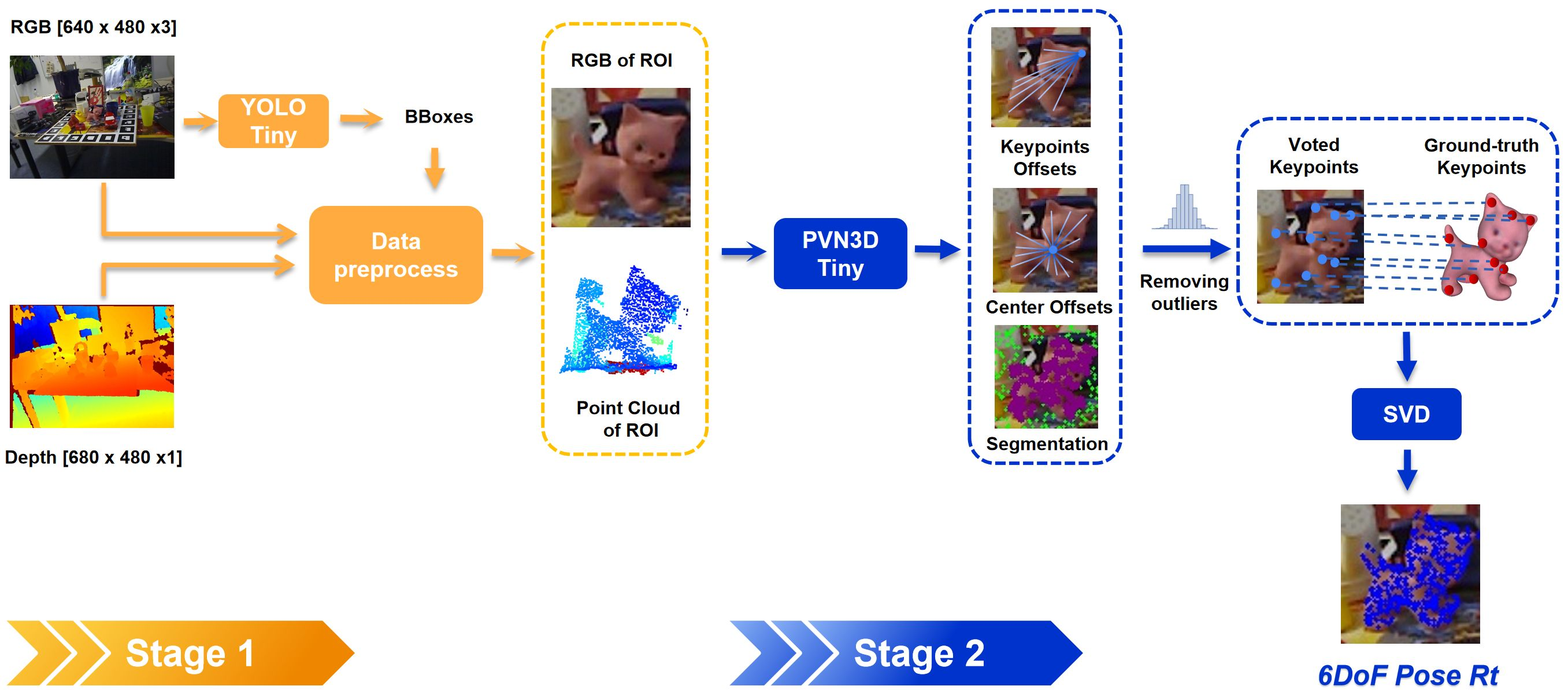
In this work, we propose a data generation pipeline by leveraging the 3D suite Blender to produce synthetic RGBD image datasets with 6D poses for robotic picking. The proposed pipeline can efficiently generate large amounts of photo-realistic RGBD images for the object of interest. In addition, a collection of domain randomization techniques is introduced to bridge the gap between real and synthetic data. Furthermore, we develop a real-time two-stage 6D pose estimation approach by integrating the object detector YOLO-V4-tiny and the 6D pose estimation algorithm PVN3D for time sensitive robotics applications. With the proposed data generation pipeline, our pose estimation approach can be trained from scratch using only synthetic data without any pre-trained models. The resulting network shows competitive performance compared to state-of-the-art methods when evaluated on LineMod dataset. We also demonstrate the proposed approach in a robotic experiment, grasping a household object from cluttered background under different lighting conditions.
翻译:在这项工作中,我们建议利用3D套套件Blender编织一个数据生成管道,利用该套3D套套件生成合成的 RGBD 图像数据集,以6D 制成用于机器人采摘的6D 。拟议编织的编织管道可以有效地生成大量符合照片现实的 RGBD 图像,供感兴趣的对象使用。此外,还采用了一套域随机化技术,以弥合真实数据和合成数据之间的差距。此外,我们开发了一个实时的两阶段 6D 构成估计方法,将物体探测器YOLO-V4-tiny和6D 构成时间敏感机器人应用的PVN3D 估计算法。在拟议的数据生成管道中,我们只能利用合成数据进行从零到零的培训,而无需经过任何预先培训的模型。由此形成的网络显示在对LineMod数据集进行评估时与最新技术方法相比具有竞争性的性能。我们还演示了机器人实验中的拟议方法,在不同的照明条件下捕捉住背景的家庭物体。