
报告题目:
Perception, Prediction, and Large Scale Data Collection for Autonomous Cars
报告简介:
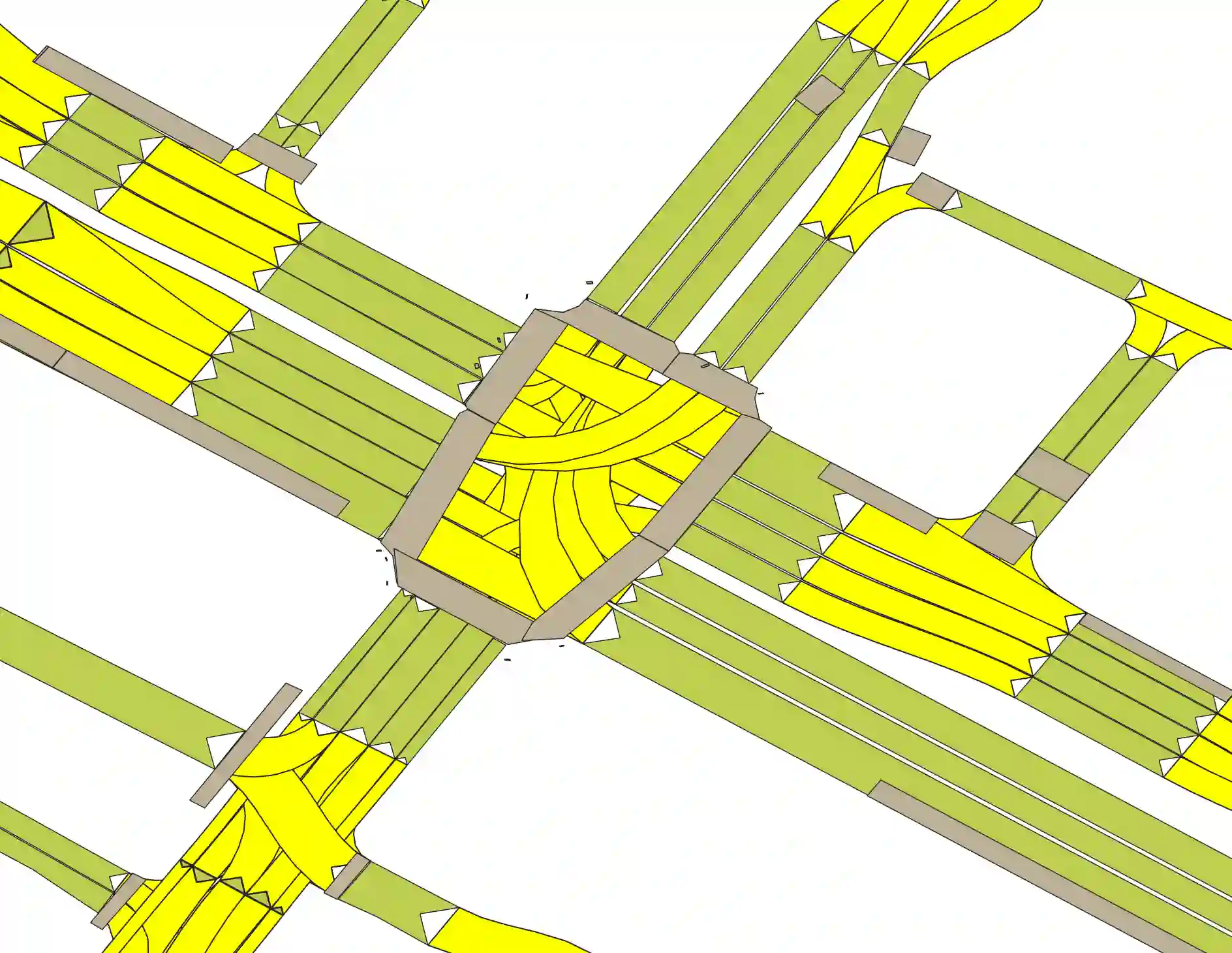
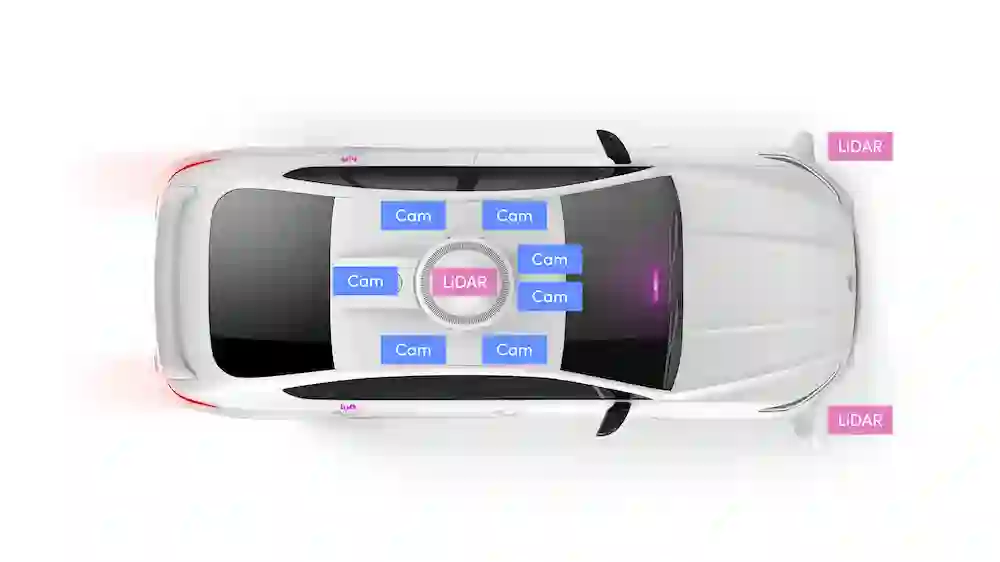
预计自动驾驶汽车将极大地重新定义交通运输的未来。当这项技术完全实现时,它将带来巨大的社会、环境和经济效益。我们很高兴能分享一个全面的、大规模的数据集,其中包括原始传感器摄像头和激光雷达输入,这是一个由多辆高端自主车辆组成的车队在有限的地理区域内所感知到的。该数据集还包括高质量的、带有人类标签的交通代理的3D边界框,一个底层的HD空间语义图。因此,我们的目标是赋予社区权力,促进进一步发展,并从先进的工业自主车辆计划的角度分享我们对未来机遇的见解。
嘉宾介绍:
Luc Vincent,Peter Ondruska, Ashesh Jain,Sammy Omari,Vinay Shet。
成为VIP会员查看完整内容

相关内容
专知会员服务
17+阅读 · 2020年3月9日
专知会员服务
12+阅读 · 2020年1月7日
专知会员服务
32+阅读 · 2019年11月28日
Arxiv
12+阅读 · 2020年6月10日




相关VIP内容
专知会员服务
17+阅读 · 2020年3月9日
专知会员服务
12+阅读 · 2020年1月7日
专知会员服务
32+阅读 · 2019年11月28日
相关资讯
相关论文
Arxiv
12+阅读 · 2020年6月10日