【泡泡一分钟】用于评估视觉惯性里程计的TUM VI数据集
每天一分钟,带你读遍机器人顶级会议文章
标题:The TUM VI Benchmark for Evaluating Visual-Inertial Odometry
作者:David Schubert∗, Thore Goll∗, Nikolaus Demmel∗, Vladyslav Usenko∗, Jorg St ¤ uckler and Daniel Cremers
来源:IROS 2018
编译:章绩伟
审核:陈世浪,颜青松
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

视觉里程计和SLAM方法在诸如增强现实或机器人等领域中具有广泛的应用。 通过惯性测量补充视觉传感器能够极大地提高里程计的跟踪精度和稳健性,因此视觉惯性里程计(VIO)方法引起了研究者的极大兴趣。 在本文中,我们提出了TUM VI标准集。这是一种用于视觉惯性里程计(VIO)的公开数据集并且在不同的场景中具有多种序列。
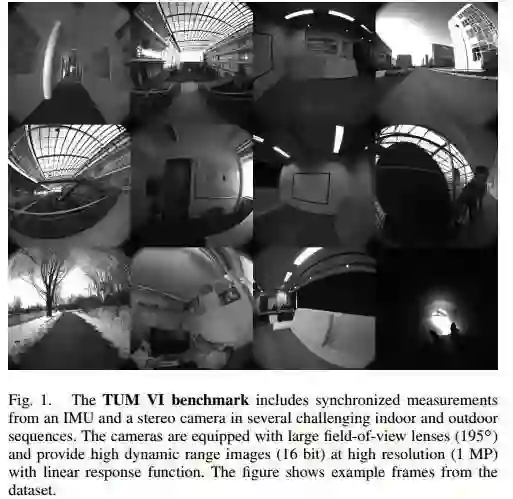
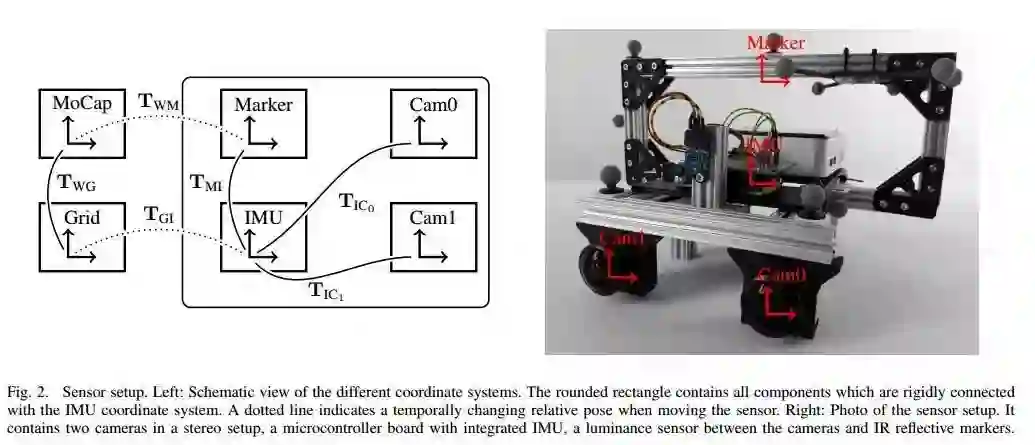
该数据集提供了分辨率为1024x1024、帧率为20 Hz的高动态范围光度校准图像。此外,IMU以200 Hz的频率测量3轴上的加速度和角速度。相机和IMU在硬件中进行时间同步。 为了进行轨迹评估,我们还在数据序列的开始和结束处以120 Hz的高频率从运动捕捉系统中获取精确的标准姿态数据,并将其与相机和IMU测量值对准。
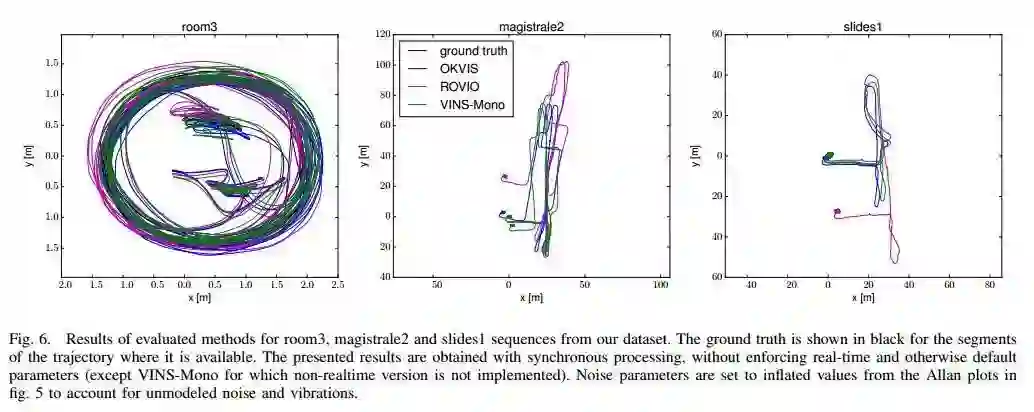
我们不仅将具有原始数据和校准数据的完整数据集公开而且用该数据集上评估了最先进的视觉惯性里程计(VIO)算法。

Abstract
Visual odometry and SLAM methods have a large variety of applications in domains such as augmented reality or robotics. Complementing vision sensors with inertial measurements tremendously improves tracking accuracy and robustness, and thus has spawned large interest in the development of visual-inertial (VI) odometry approaches. In this paper, we propose the TUM VI benchmark, a novel dataset with a diverse set of sequences in different scenes for evaluating VI odometry. It provides camera images with 1024x1024 resolution at 20 Hz, high dynamic range and photometric calibration. An IMU measures accelerations and angular velocities on 3 axes at 200 Hz, while the cameras and IMU sensors are timesynchronized in hardware. For trajectory evaluation, we also provide accurate pose ground truth from a motion capture system at high frequency (120 Hz) at the start and end of the sequences which we accurately aligned with the camera and IMU measurements. The full dataset with raw and calibrated data is publicly available. We also evaluate state-of-the-art VI odometry approaches on our dataset.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





