【泡泡一分钟】SOFT-SLAM: 面向自主无人机的高效立体视觉SLAM
每天一分钟,带你读遍机器人顶级会议文章
标题:SOFT-SLAM: Computationally efficient stereo visual simultaneous localization and mapping for autonomous unmaned aerial vehicles
作者:Igor Cvišić, Josip Ćesić, Ivan Marković, and Ivan Petrović
来源:Journal of Field Robotics (JFR2017)
播音员:清蒸鱼
编译:陈建华
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——SOFT-SLAM: 面向自主无人机的高效立体视觉SLAM,该文章发表于JFR2017。
无人机在无GPS环境下的自主导航是一个具有挑战性的问题,尤其对于有效载荷小且电池使用时间有限的小型无人机来说更是如此。基于视觉的SLAM可能成为上述问题的一个解决方案,这是因为相机具有尺寸小,重量轻,可用性好以及信息带宽大等优点,很好规避了无人机的所有约束。在本文中,作者提出了一个能够输出高精度定位结果以及稠密环境地图的立体视觉SLAM系统。
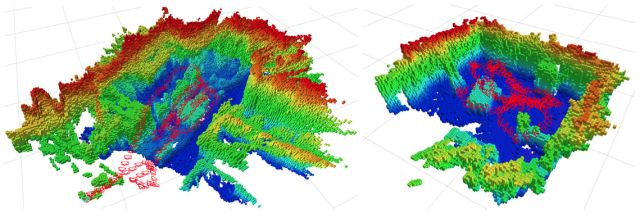
图1 本文系统生成的octomap示例图
作者开发这套系统的目标是参加欧洲机器人挑战赛(EuRoC)。这个比赛的目的是使用小型无人机对工业设施进行空中检查。本文所提方法包括一个基于特征跟踪的立体视觉里程计算法(SOFT),该算法目前在KITTI数据集的立体视觉方法中居于首位。作者通过SOFT进行位姿估计,并且构建了一个基于特征点的位姿图SLAM方案,称之为SOFT-SLAM。SOFT-SLAM具有两个完全独立的线程分别进行里程计和建图工作,并且支持大范围的回环检测以及保证系统的全局一致性。此外,作者还提供了一个融入IMU信息的系统版本。
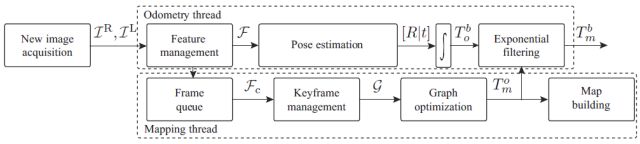
图2 SOFT-SLAM系统框架

图3 SOFT-VO系统框架
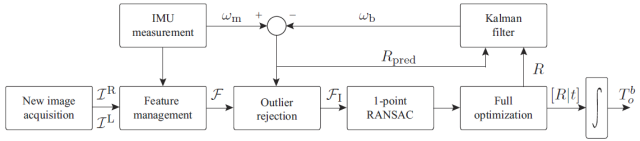
图4 SOFT-VIO系统框架
同时,SOFT-SLAM系统可以在困难场景下仅使用一个两线程的板载计算机获得确定性的结果,并且能够实现20Hz的恒定执行速率。更值得一提的是,无人机使用SOFT-SLAM在EuRoC的挑战3,阶段IIa-基准测试,任务2数据集中获得了最高定位精度。此外,作者还在两个主流数据集上对SOFT-SLAM系统进行了详细评价,并与其他主流的系统(如ORB-SLAM2, LSD-SLAM)进行了对比,结果显示SOFT-SLAM在大多数数据集上能够获得更高的精度,并且具有更高的运行效率。

图5 SOFT-SLAM在EuRoC数据集上的测试效果
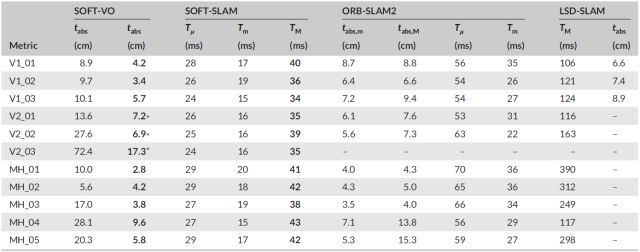
图6 SOFT-SLAM与其他主流系统在EuRoC数据集上的测试结果对比
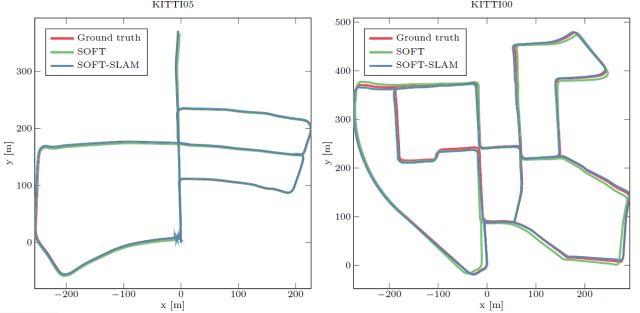
图7 SOFT-SLAM在KITTI数据集上的测试效果
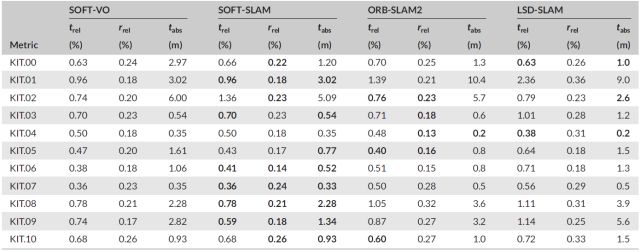
图8 SOFT-SLAM与其他主流系统在KITTI数据集上的测试结果对比

Abstract
Autonomous navigation of unmanned aerial vehicles (UAVs) in GPS-denied environments is a challenging problem, especially for small-scale UAVs characterized by a small payload and limited battery autonomy. A possible solution to the aforementioned problem is vision-based simultaneous localization and mapping (SLAM), since cameras, due to their dimensions, low weight, availability, and large information bandwidth, circumvent all the constraints of UAVs. In this paper, we propose a stereo vision SLAM yielding very accurate localization and a dense map of the environment developed with the aim to compete in the European Robotics Challenges (EuRoC) targeting airborne inspection of industrial facilities with small-scale UAVs. The proposed approach consists of a novel stereo odometry algorithm relying on feature tracking (SOFT), which currently ranks first among all stereo methods on the KITTI dataset. Relying on SOFT for pose estimation, we build a feature-based pose graph SLAM solution, which we dub SOFT-SLAM. SOFT-SLAM has a completely separate odometry and mapping threads supporting large loop-closing and global consistency. It also achieves a constant-time execution rate of 20Hzwith deterministic results using only two threads of an onboard computer used in the challenge. The UAV running our SLAM algorithm obtained the highest localization score in the EuRoC Challenge 3, Stage IIa–Benchmarking, Task 2. Furthermore, we also present an exhaustive evaluation of SOFT-SLAM on two popular public datasets, and we compare it to other state-of-the-art approaches, namely ORB-SLAM2 and LSDSLAM. The results show that SOFT-SLAM obtains better localization accuracy on the majority of datasets sequences, while also having a lower runtime.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




