【泡泡一分钟】神经SLAM:使用外部存储器让智能体学习探索环境
每天一分钟,带你读遍机器人顶级会议文章
标题:Neural SLAM: Learning to Explore with External Memory
作者:Jingwei Zhang, Lei Tai, Joschka Boedecker, Wolfram Burgard, Ming Liu
来源:arXiv:1706.09520
播音员:王肃
编译:蔡纪源
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——神经SLAM:使用外部存储器让智能体学习探索环境,该文章发表于arXiv。
在本文中,作者提出了一种能让智能体从传感器数据中学习到全局地图表示的方法,以帮助他们在新环境中进行探索。
传统的长短时记忆网络LSTMs和递归神经网络RNNs中的记忆结构基本上都是短期的,这对信息导航或探索策略的研究而言是远远不够的。如下图1所示,作者通过软注意机制将SLAM的定位、运动预测与测量更新部分嵌入到深度学习网络中。基于外部存储器结构的寻址,使用外部存储器作为智能体环境感知后的内在表征。提出的深度神经网络是完全可微的,保证了学习到的表征是分布式的、特征丰富的,增强了传统SLAM方法的鲁棒性与适应性。
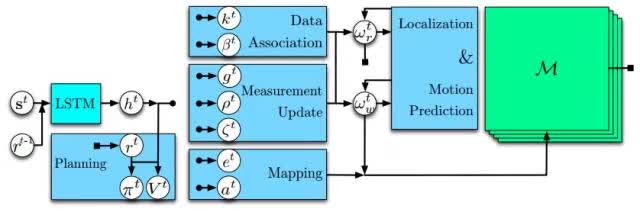
图1 Neural-SLAM模型结构图
作者表明,这种方法可以帮助增强学习的智能体成功探索新环境。 作者在具有挑战性的网格环境和初步的Gazebo实验中验证了提出方法的有效性,相关实验视频可以在链接中访问https://goo.gl/G2Vu5y.。
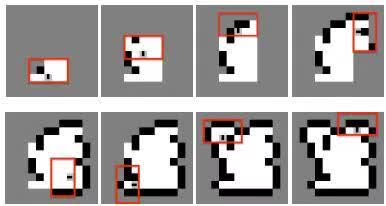
图2 本文方法成功让一个Agent探索完整的环境
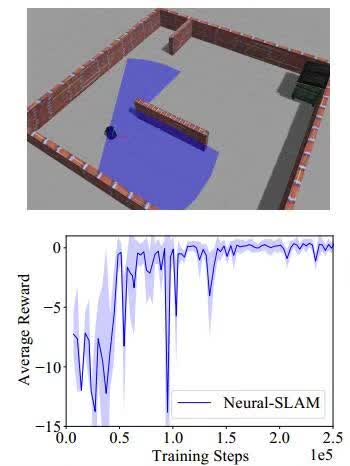
图3 Gazebo环境中的实验结果

Abstract
We present an approach for agents to learn representations of a global map from sensor data, to aid their exploration in new environments. To achieve this, we embed procedures mimicking that of traditional simultaneous localization and mapping (SLAM) into the soft attention based addressing of external memory architectures, in which the external memory acts as an internal representation of the environment for the agent. This structure encourages the evolution of SLAM-like behaviors inside a completely differentiable deep neural network. We show that this approach can help reinforcement learning agents to successfully explore new environments where long-term memory is essential. We validate our approach in both challenging grid-world environments and preliminary Gazebo experiments. A video of our experiments can be found at: https://goo.gl/G2Vu5y.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com