【泡泡一分钟】通过学习轮式里程计和IMU误差的定位
每天一分钟,带你读遍机器人顶级会议文章
标题:Learning Wheel Odometry and IMU Errors forLocalization
作者:Martin Brossard, Silvere Bonnabel
来源:International Conference on Robotics and Automation (ICRA), May 2019
编译:孙钦
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

里程计技术是自主机器人导航的关键,因为它能够在环境中进行自我定位。然而,当相机和雷达无法提供信息或不可用时,设计一个鲁棒的里程计系统是十分具有挑战性的。在本文中,我们利用深度学习和变分推理的最新进展来校正状态空间系统的动态和观测模型。该方法在原始模型与真实值之间的残差上训练高斯过程,并被应用于基于两轮编码器,光纤陀螺仪和惯性测量单元(IMU)的机器人导航的公共可用数据集上。我们还提出利用轮速传感器和光纤陀螺仪进行状态传播,利用IMU来更新估计的状态,从而构建扩展卡尔曼滤波器(EKF)。实验结果清楚地表明,(经过学习的)校正模型和EKF比原始模型更准确。

图1 左[18]右[19]两图分别为用于采集数据的配备了两个轮式编码器,光纤陀螺仪和消费级IMU的载体车。
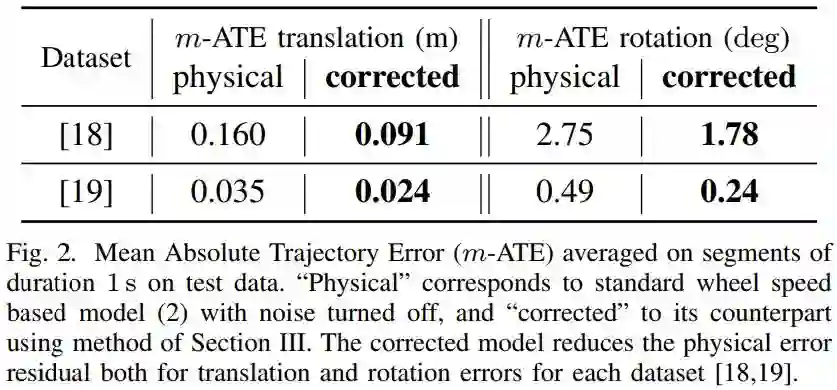
图2 测试数据上持续时间为1 s的段的平均绝对轨迹误差(m-ATE)。“Physical”对应无噪声的标准轮速运动模模型, “corrected”对应是在本文第三节中提出的方法。在[18,19]每个数据集中,corrected模型减少了physical模型的平移和旋转的误差残差。
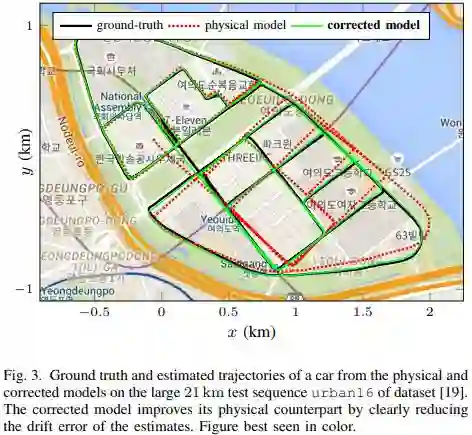
图3 在[19]的urban16数据集中的21 km的大型测试序列中,真实轨迹与physical和corrected模型的估计的轨迹。
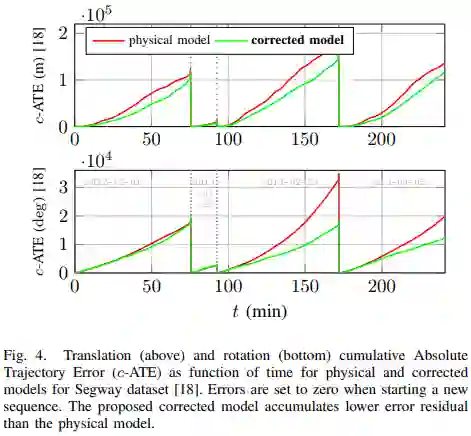
图4 在[18]数据集中,physical和corrected模型的平移(顶部)和旋转(底部)的累计绝对轨迹误差。
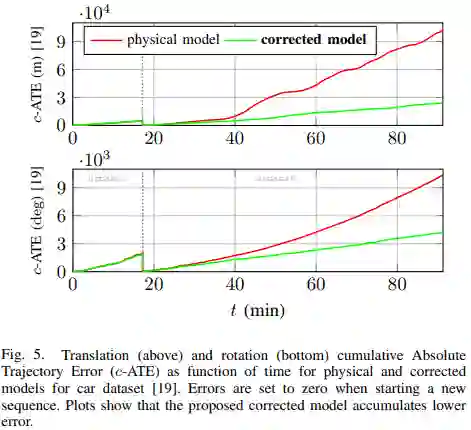
图5 在[19]数据集中,physical和corrected模型的平移(顶部)和旋转(底部)的累计绝对轨迹误差。
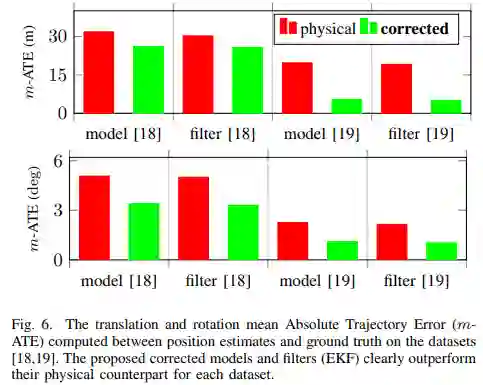
图6 在[18, 19]数据集中,physical和corrected模型的平移和旋转的平均绝对轨迹误差。提出的corrected模型和EKF滤波明显比physical模型好。
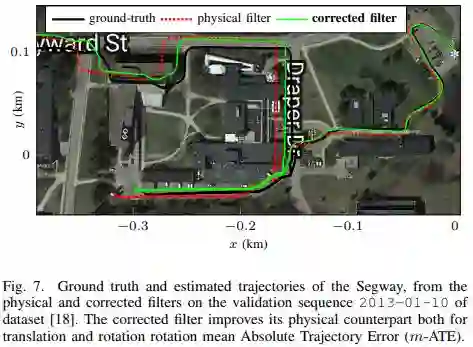
图7 真实轨迹与physical和corrected方法估计的轨迹。

Abstract
Odometry techniques are key to autonomous robot navigation, since they enable self-localization in the environment. However, designing a robust odometry system is particularly challenging when camera and LiDAR are uninformative or unavailable. In this paper, we leverage recent advances in deep learning and variational inference to correct dynamical and observation models for state-space systems. The methodology trains Gaussian processes on the residual between the original model and the ground truth, and is applied on publicly available datasets for robot navigation based on two wheel encoders, a fiber optic gyro, and an Inertial Measurement Unit (IMU). We also propose to build an Extended Kalman Filter (EKF) on the learned model using wheel speed sensors and the fiber optic gyro for state propagation, and the IMU to update the estimated state. Experimental results clearly demonstrate that the (learned) corrected models and EKF are more accurate than their original counterparts.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




