【泡泡一分钟】基于视觉SLAM稀疏特征构建可导航地图(IROS-6)
每天一分钟,带你读遍机器人顶级会议文章
标题:Building Maps for Autonomous Navigation Using Sparse Visual SLAM Features
作者:TYonggen Ling and Shaojie Shen
来源:IROS 2017
播音员:刘畅
编译:王慧国
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

今天介绍的文章是“Building Maps for Autonomous Navigation Using Sparse Visual SLAM Features ”——基于视觉SLAM稀疏特征构建可导航地图,该文章发表在IROS2017。
自动导航是由定位,建图,运动规划和控制集成起来的系统,是移动机器人系统的核心能力。然而,大多数的研究仅仅简单地考虑孤立的技术模块。
SLAM算法生成的地图与运动规划需要的地图存在着较大的距离。这篇文章展示了一个完整的在线系统,它包括三个模块:增量的SLAM,实时稠密建图和自由空间提取。获得的自由空间体积(即四面体的镶嵌)可以作为运动规划的常规几何约束。
我们的系统能够实时地运行,这要归功于提出的工程决策,它提升了系统的性能。我们在KITTI数据集上做了大量的实验,实验表明它的实时性能。定量以及定性的结果都显示了建图的精度。为了社区的利益,我们将源代码公开了。
源码链接:https://github.com/ygling2008/lightweight_mapping
程序的效果图如下:
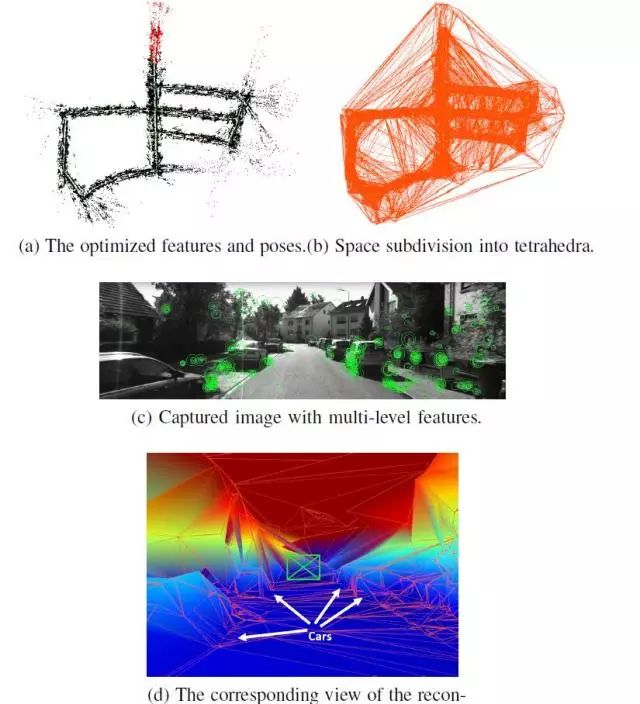
图1 算法的效果图
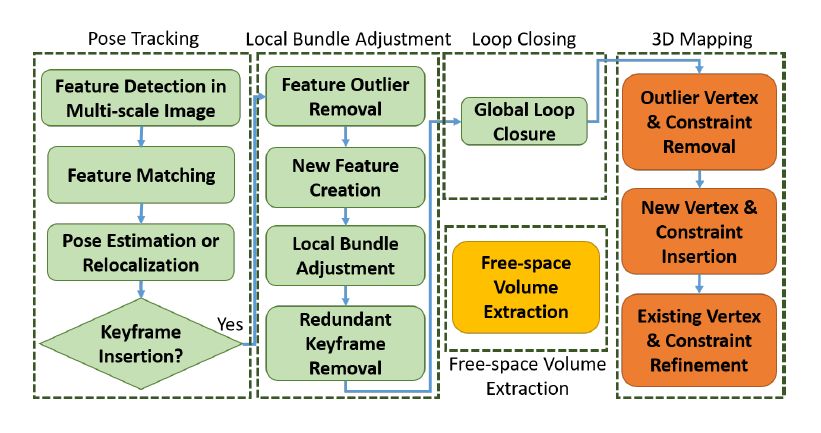
图2 系统的框架图
它由五个线程组成。姿态跟踪线程估计出每一帧的相机姿态,并决定是否插入关键帧。如果由新的关键帧插入,那么局部的捆集优化将被执行,相机的局部姿态和特征点的空间位置将被调整。回环检测部分和全局的优化在另外的线程中执行。3D的建图线程将优化过的稀疏特征点转化成稠密的体积表达。自由空间体积提取线程会定期输出最新的自由空间量,用于运动规划的使用。
Abstract
Autonomous navigation, which consists of a systematic integration of localization, mapping, motion planning and control, is the core capability of mobile robotic systems. However, most research considers only isolated technical mod-ules. There exist significant gaps between maps generated by SLAM algorithms and maps required for motion planning. This paper presents a complete online system that consists in three modules: incremental SLAM, real-time dense mapping, and free space extraction. The obtained free-space volume (i.e. a tessellation of tetrahedra) can be served as regular geometric constraints for motion planning. Our system runs in real-time thanks to the engineering decisions proposed to increase the system efficiency. We conduct extensive experiments on the KITTI dataset to demonstrate the run-time performance. Qualitative and quantitative results on mapping accuracy are also shown. For the benefit of the community, we make the source code public.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





