【泡泡一分钟】DS-SLAM: 动态环境下的语义视觉SLAM
每天一分钟,带你读遍机器人顶级会议文章
标题:DS-SLAM: A Semantic Visual SLAM towards Dynamic Environments
作者:Chao Yu, Zuxin Liu, Xin-Jun Liu, Fugui Xie, Yi Yang, Qi Wei, Qiao Fei
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:明煜航
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权。

摘要

同时定位与建图(SLAM)被认为是智能移动机器人最基本的能力。在过去的数十年里,很多SLAM系统以其在特定条件下出色的性能给人们留下了深刻的印象。然而,依然存在着很多亟待解决的问题,比如说如何处理动态环境中的移动物体,如何使机器人真正的理解周围环境并完成更高级的任务。
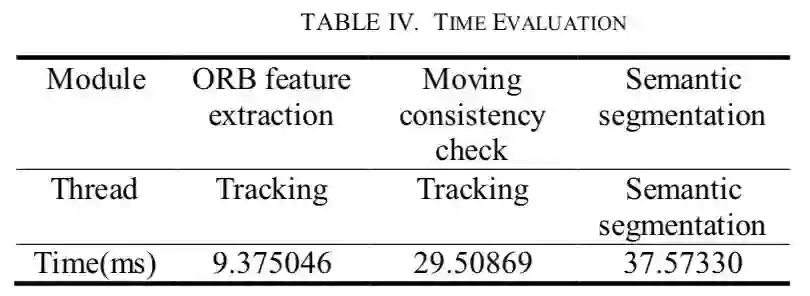
在本篇论文中,作者提出了一个鲁棒的针对动态环境的语义视觉SLAM系统,叫做DS-SLAM。该系统中共有5个并行的线程:跟踪,语义分割,局部建图,闭环,以及语义地图的稠密重建。
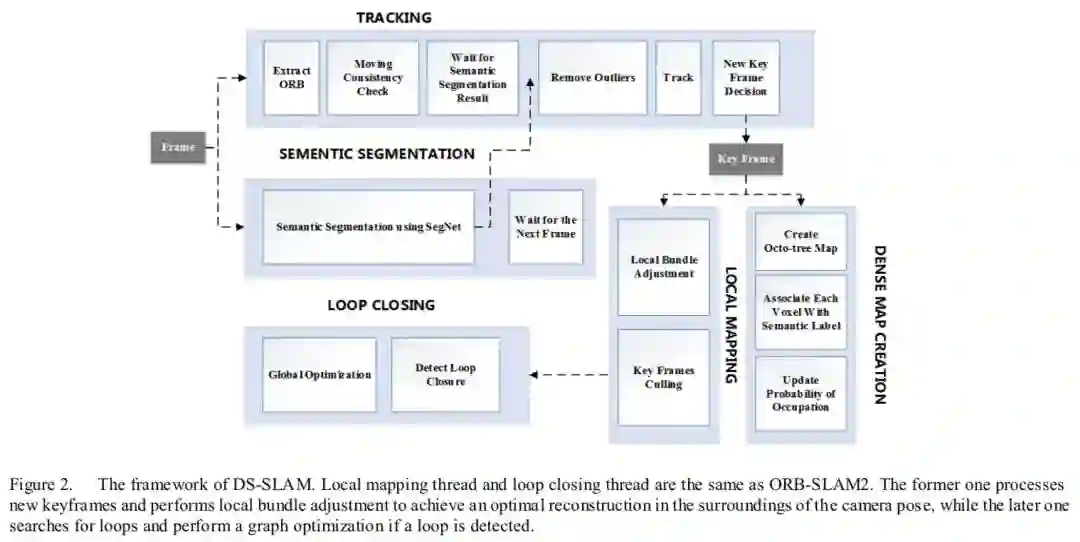
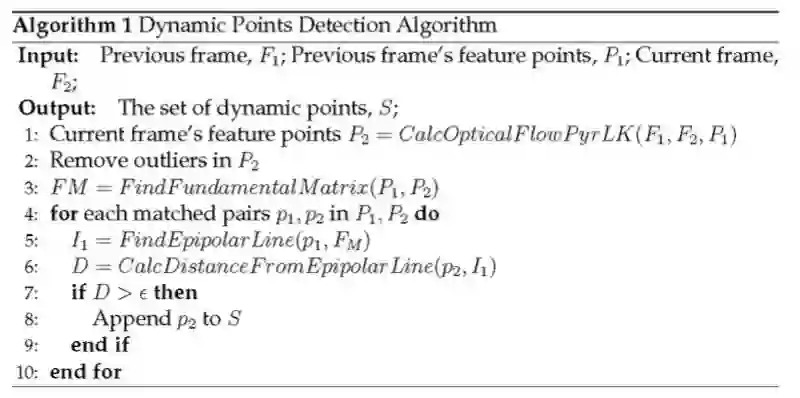
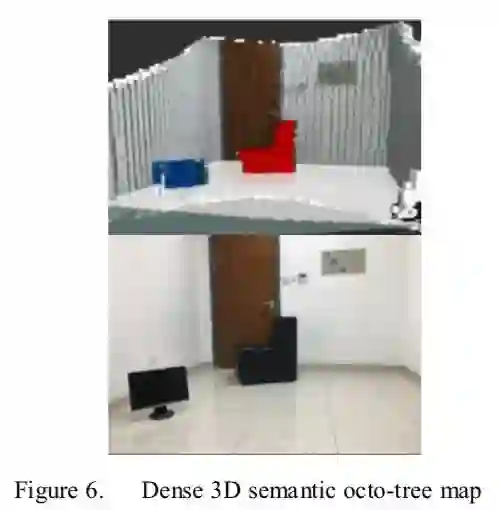
DS-SLAM结合了语义分割网络与移动一致性检测方法来减少动态物体的影响,由此极大的提高了动态环境中定位的精度。与此同时,该系统生成了一个可以被用于高阶任务的稠密语义八叉树地图。
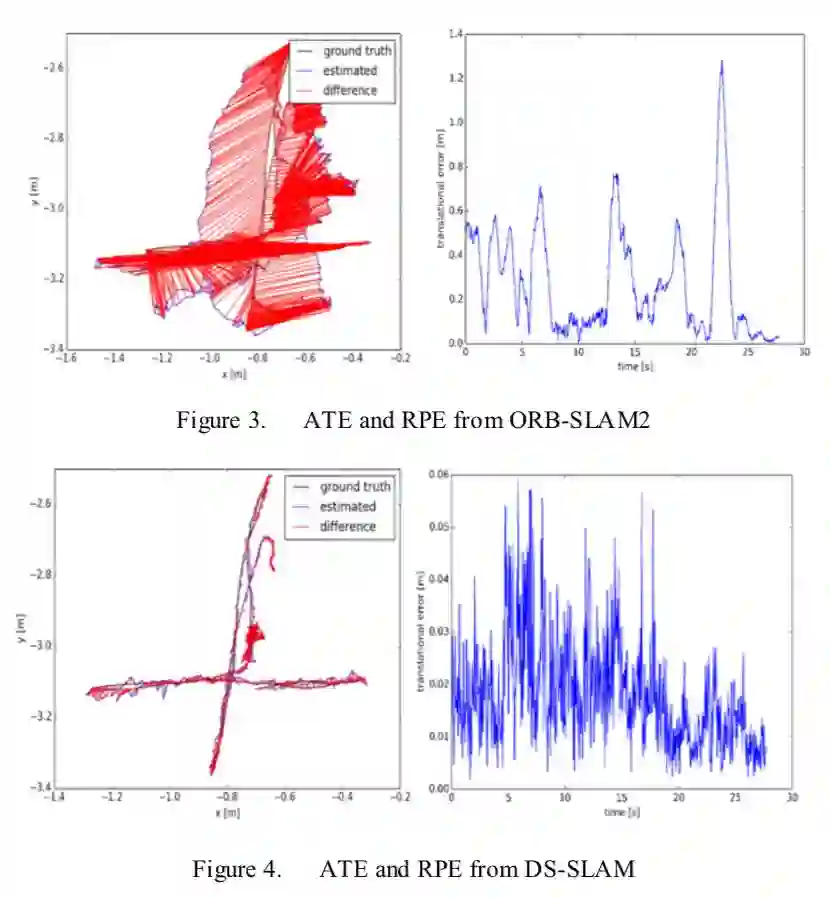
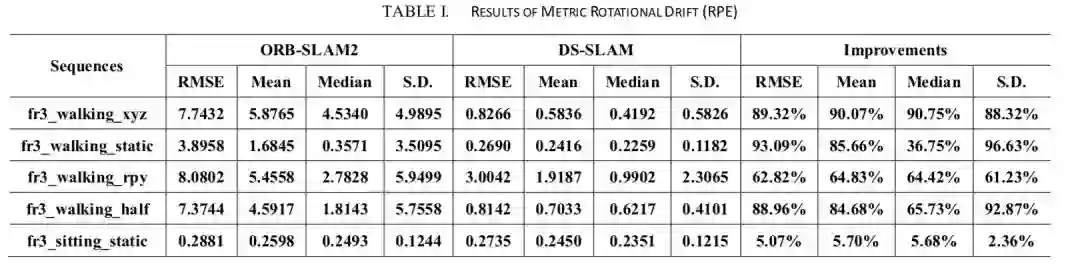
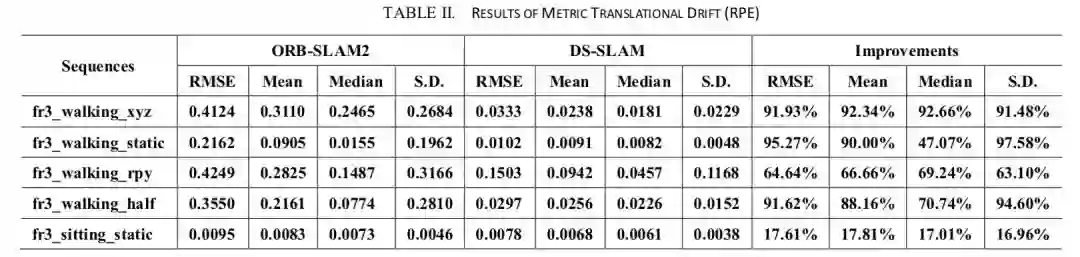
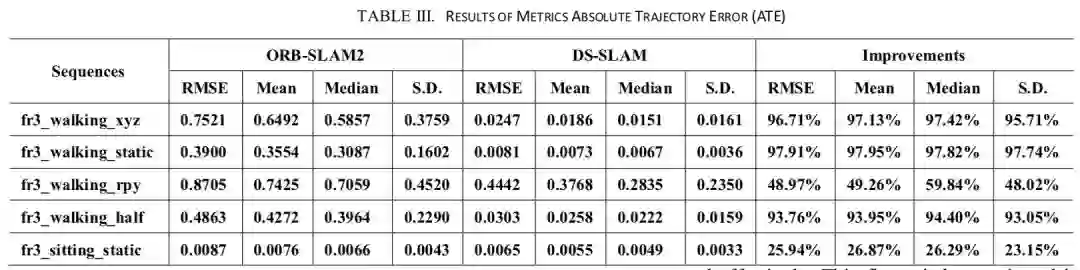
作者在TUM RGB-D数据集以及真实环境下测试了该系统,结果表明该系统的绝对路径精度比ORB-SLAM2提高了一个数量级。所以DS-SLAM是高动态环境中目前最先进的SLAM系统。

Abstract
Simultaneous Localization and Mapping (SLAM) is considered to be a fundamental capability for intelligent mobile robots. Over the past decades, many impressed SLAM systems have been developed and achieved good performance under certain circumstances. However, some problems are still not well solved, for example, how to tackle the moving objects in the dynamic environments, how to make the robots truly understand the surroundings and accomplish advanced tasks. In this paper, a robust semantic visual SLAM towards dynamic environments named DS-SLAM is proposed. Five threads run in parallel in DS-SLAM: tracking, semantic segmentation, local mapping, loop closing and dense semantic map creation. DS-SLAM combines semantic segmentation network with moving consistency check method to reduce the impact of dynamic objects, and thus the localization accuracy is highly improved in dynamic environments. Meanwhile, a dense semantic octo-tree map is produced, which could be employed for high-level tasks. We conduct experiments both on TUM RGB-D dataset and in real-world environment. The results demonstrate the absolute trajectory accuracy in DS-SLAM can be improved one order of magnitude compared with ORB-SLAM2. It is one of the state-of-the-art SLAM systems in high-dynamic environments.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com