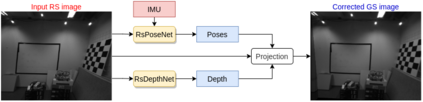
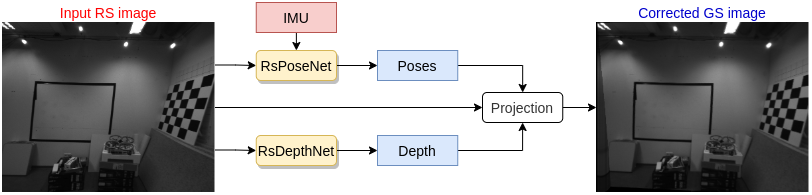
Rolling shutter distortion is highly undesirable for photography and computer vision algorithms (e.g., visual SLAM) because pixels can be potentially captured at different times and poses. In this paper, we propose a deep neural network to predict depth and row-wise pose from a single image for rolling shutter correction. Our contribution in this work is to incorporate inertial measurement unit (IMU) data into the pose refinement process, which, compared to the state-of-the-art, greatly enhances the pose prediction. The improved accuracy and robustness make it possible for numerous vision algorithms to use imagery captured by rolling shutter cameras and produce highly accurate results. We also extend a dataset to have real rolling shutter images, IMU data, depth maps, camera poses, and corresponding global shutter images for rolling shutter correction training. We demonstrate the efficacy of the proposed method by evaluating the performance of Direct Sparse Odometry (DSO) algorithm on rolling shutter imagery corrected using the proposed approach. Results show marked improvements of the DSO algorithm over using uncorrected imagery, validating the proposed approach.
翻译:在本文中,我们提议建立一个深神经网络,从一个单一图像中预测深度和行态,以进行滚动屏障校正。我们在这项工作中的贡献是将惯性测量单位(IMU)数据纳入面容改进过程,与最新工艺相比,这大大加强了面容预测。由于精确度和稳健度的提高,许多视觉算法都有可能使用滚动屏障相机摄取的图像,并产生非常准确的结果。我们还扩展了一个数据集,以拥有真正的滚动屏障图像、IMU数据、深度地图、相机显示和相应的全球闭关图像,用于滚动屏障校正培训。我们通过评估直接斯帕瑟Odo度测量(DSO)算法在使用拟议方法校正的滚动屏障图像方面的性能,展示了拟议方法的功效。结果显示,DSO算法在使用未经校正的图像、验证拟议方法方面有了显著改进。