ICRA 2019 论文速览 | 基于Deep Learning 的SLAM
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
笔者汇总了ICRA 2019 SLAM相关论文,总共分为四个部分:
Deep learning + traditional SLAM,见 ICRA 2019 论文速览 | SLAM 爱上 Deep Learning
Traditional SLAM/3D vision,见ICRA 2019 论文速览 | 传统SLAM、三维视觉算法进展
Deep learning based SLAM
SLAM evaluation and datasets
本文介绍:deep learning based SLAM
后续文章敬请期待
1.E2E-VO/ SLAM
GEN-SLAM: Generative Modeling for Monocular Simultaneous Localization and Mapping(深度学习位姿和深度图)
Keywords: SLAM, Localization, Visual-Based Navigation

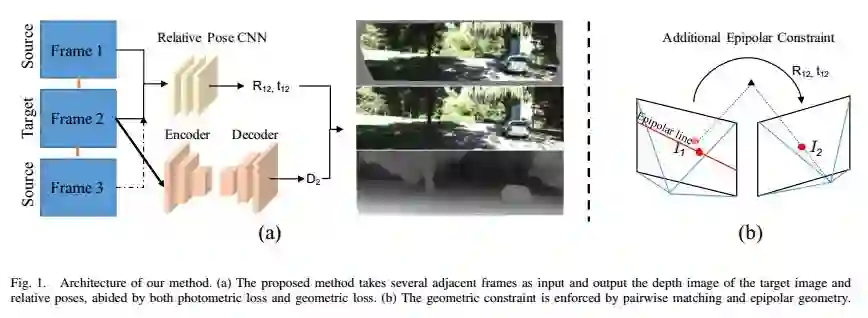
Beyond Photometric Loss for Self-Supervised Ego-Motion Estimation(深度学习,自监督的深度和里程计,参考了GeoNet和SfmLearner)
Keywords: SLAM, Visual Learning, Localization
代码:
https://github.com/hlzz/DeepMatchVO
Learning Monocular Visual Odometry through Geometry-Aware Curriculum Learning(深度学习的VO)

Keywords: Localization, Visual Learning, Deep Learning in Robotics and Automation
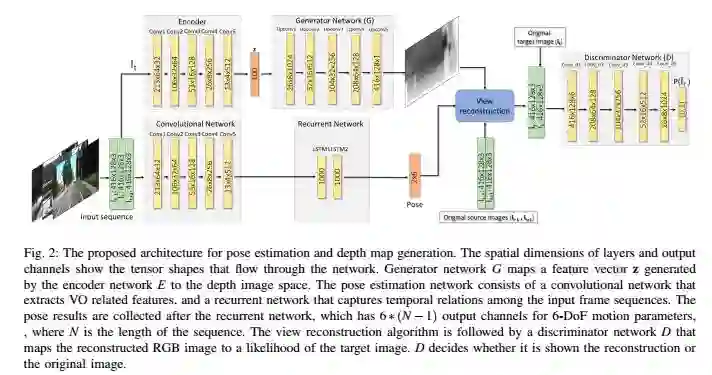
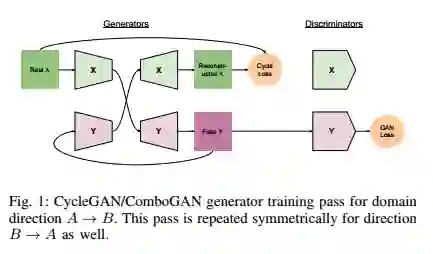
GANVO: Unsupervised Deep Monocular Visual Odometry and Depth Estimation with Generative Adversarial Networks(深度学习 基于GAN的无监督深度和VO方法)
Keywords: Deep Learning in Robotics and Automation, Localization, Visual Tracking
Unsupervised Learning of Monocular Depth and Ego-Motion Using Multiple Masks(无监督深度学习的深度图和位姿网络)
Keywords: Deep Learning in Robotics and Automation, SLAM

2. E2E Navigation
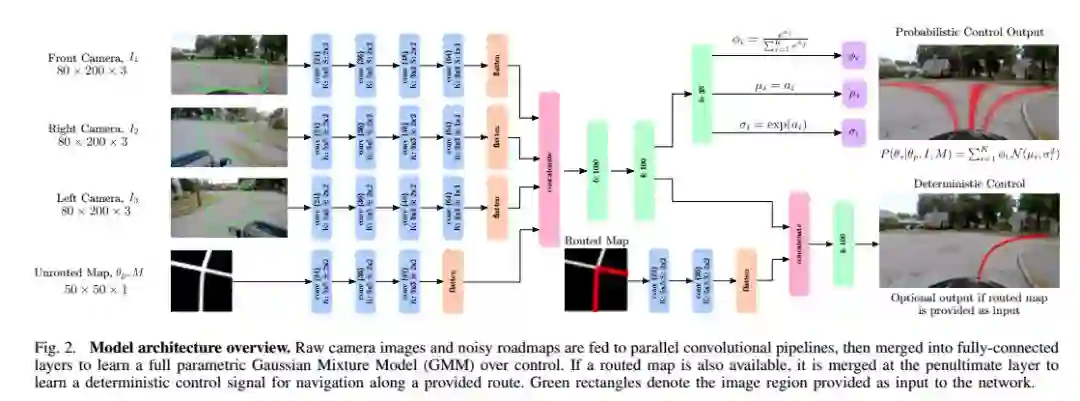
(AWARD)Variational End-To-End Navigation and Localization(端到端定位导航)
Keywords: Deep Learning in Robotics and Automation, Computer Vision for Transportation, Autonomous Vehicle Navigation
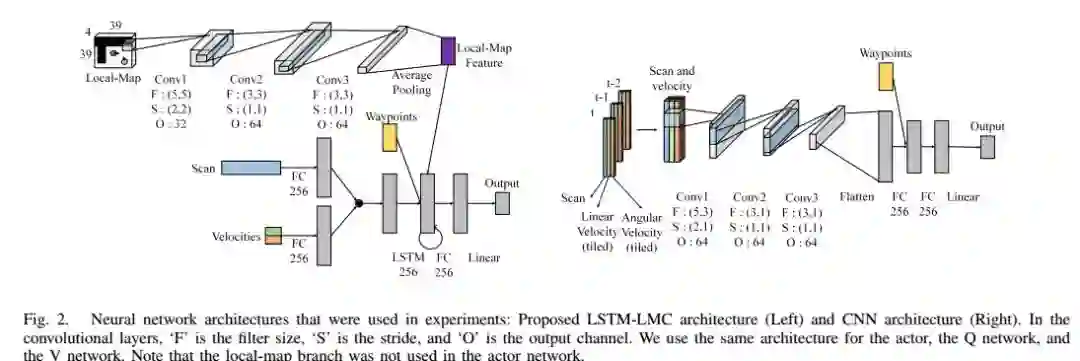
Deep Reinforcement Learning of Navigation in a Complex and Crowded Environment with a Limited Field of View(强化学习机器人视觉导航)
Keywords: Deep Learning in Robotics and Automation, Collision Avoidance, Service Robots

Generalization through Simulation: Integrating Simulated and Real Data into Deep Reinforcement Learning for Vision-Based Autonomous Flight(强化学习的无人机自主导航)
Keywords: Deep Learning in Robotics and Automation

代码
https://github.com/gkahn13/GtS
3.Feature & VPR
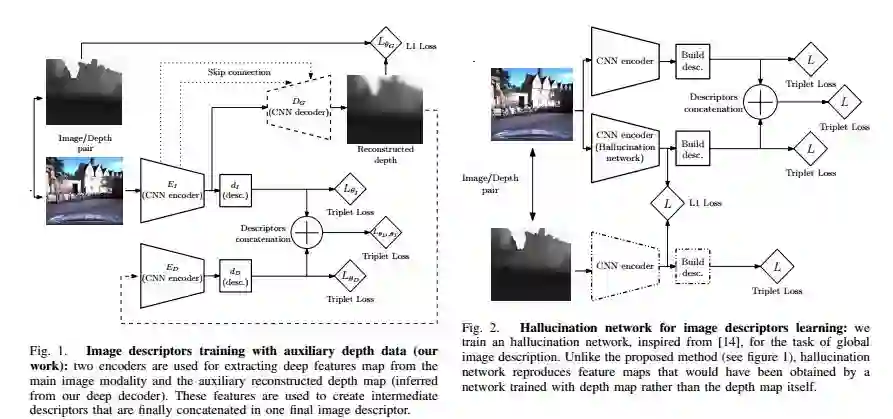
(AWARD)Learning Scene Geometry for Visual Localization in Challenging Conditions (RGB和Depth中找出场景的结构化描述特征用于VPR)
Keywords: Localization, RGB-D Perception, Computer Vision for Other Robotic Applications
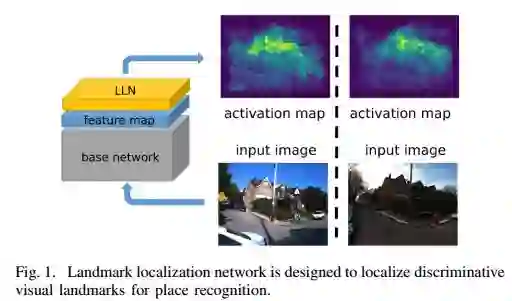
Localizing Discriminative Visual Landmarks for Place Recognition(VPR路标的显著性检测)
Keywords: Localization, Visual-Based Navigation, Computer Vision for Automation
Improving Keypoint Matching Using a Landmark-Based Image Representation(深度学习地标区域描述符和特征点匹配)
Keywords: SLAM, Localization


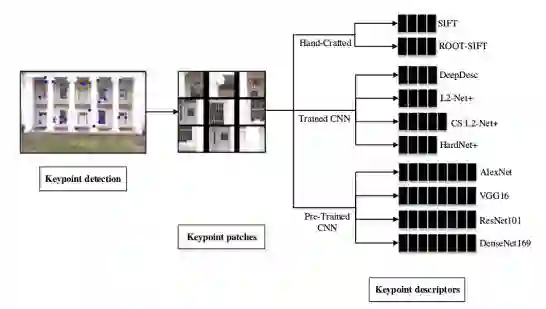
A Comparison of CNN-Based and Hand-Crafted Keypoint Descriptors(传统和深度学习特征描述子的光照和角度变化下的性能分析)
Keywords: SLAM, Visual-Based Navigation, Deep Learning in Robotics and Automation
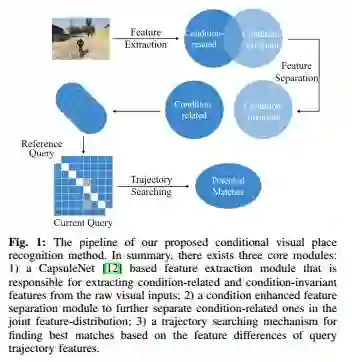
A Multi-Domain Feature Learning Method for Visual Place Recognition(迁移学习的特征学习用于场景识别)
Keywords: Localization, SLAM, Performance Evaluation and Benchmarking
Night-To-Day Image Translation for Retrieval-Based Localization(图像迁移方法的的位置定位)
Keywords: Localization, Visual Learning, Autonomous Vehicle Navigation
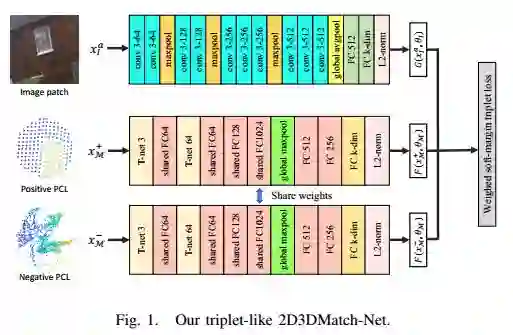
2D3D-MatchNet: Learning to Match Keypoints across 2D Image and 3D Point Cloud(深度学习,2D3D数据下的匹配特征点提取网络)
Feng, Mengdan National University of Singapore
Keywords: Deep Learning in Robotics and Automation, Visual Learning, Localization
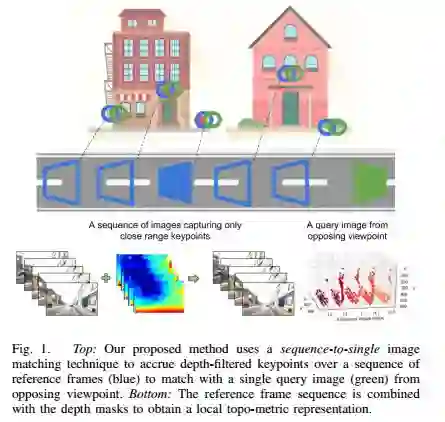
Look No Deeper: Recognizing Places from Opposing Viewpoints under Varying Scene Appearance Using Single-View Depth Estimation(用深度学习的深度预测来完成反向视角下的VPR)
Keywords: Localization, Deep Learning in Robotics and Automation
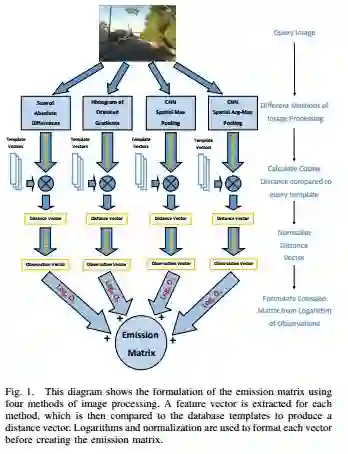
Multi-Process Fusion: Visual Place Recognition Using Multiple Image Processing Methods——IRAL(图像上多信息融合做VPR)
Keywords: Localization, Visual-Based Navigation
4.Depth & Disparity
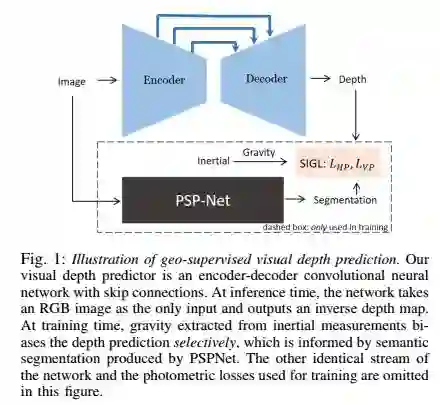
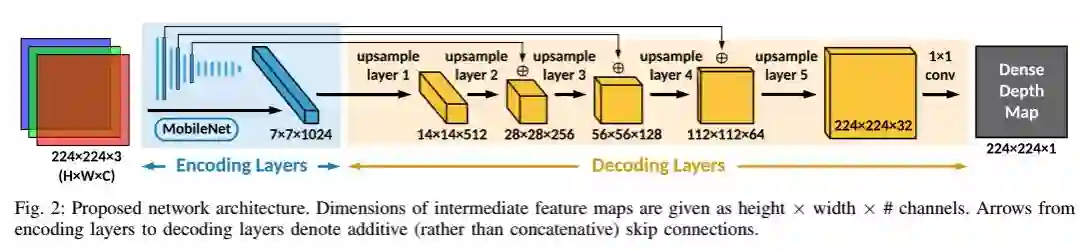
(AWARD)Geo-Supervised Visual Depth Prediction(深度图网络)
Keywords: Visual Learning, Sensor Fusion
代码
https://github.com/feixh/GeoSup
FastDepth: Fast Monocular Depth Estimation on Embedded Systems(178fps TX2上的224x224深度图计算方法)
Keywords: Deep Learning in Robotics and Automation, Range Sensing, Computer Vision for Other Robotic Applications
代码
http://fastdepth.mit.edu
https://github.com/dwofk/fast-depth
SuperDepth: Self-Supervised, Super-Resolved Monocular Depth Estimation
Keywords: Deep Learning in Robotics and Automation, Visual Learning, Mapping
Depth Completion with Deep Geometry and Context Guidance(稀疏深度图补齐网络)
Keywords: RGB-D Perception, Computer Vision for Other Robotic Applications

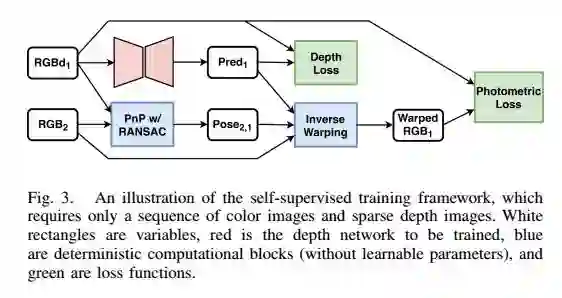
Self-Supervised Sparse-To-Dense: Self-Supervised Depth Completion from LiDAR and Monocular Camera(自监督学习的Lidar深度数据补齐)
Keywords: Visual Learning, RGB-D Perception, Sensor Fusion
代码
https://github.com/fangchangma/self-supervised-depth-completion
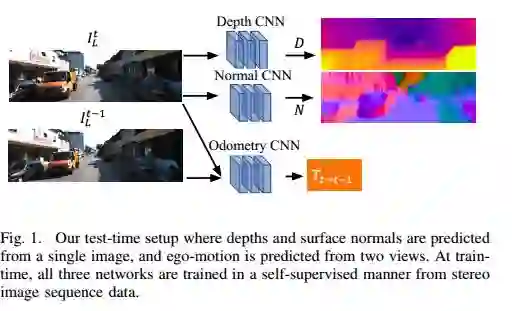
Self-Supervised Learning for Single View Depth and Surface Normal Estimation(自监督的深度和法向图估计)
Keywords: Deep Learning in Robotics and Automation, Visual Learning, Mapping
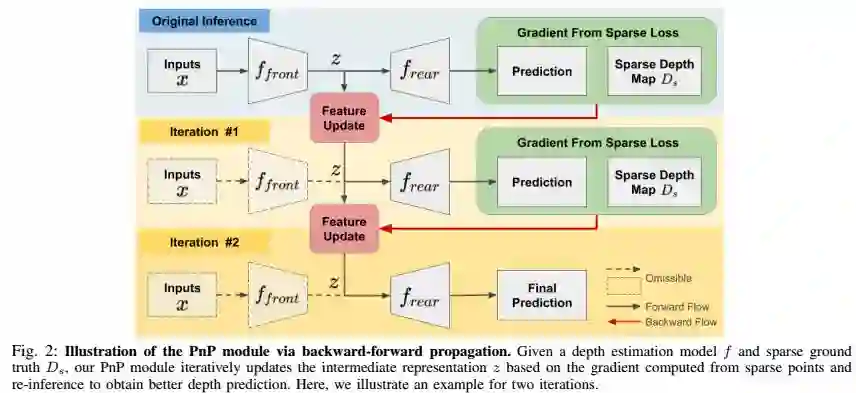
Plug-And-Play: Improve Depth Prediction Via Sparse Data Propagation(循环优化深度图)
Keywords: Deep Learning in Robotics and Automation, RGB-D Perception, Computer Vision for Automation
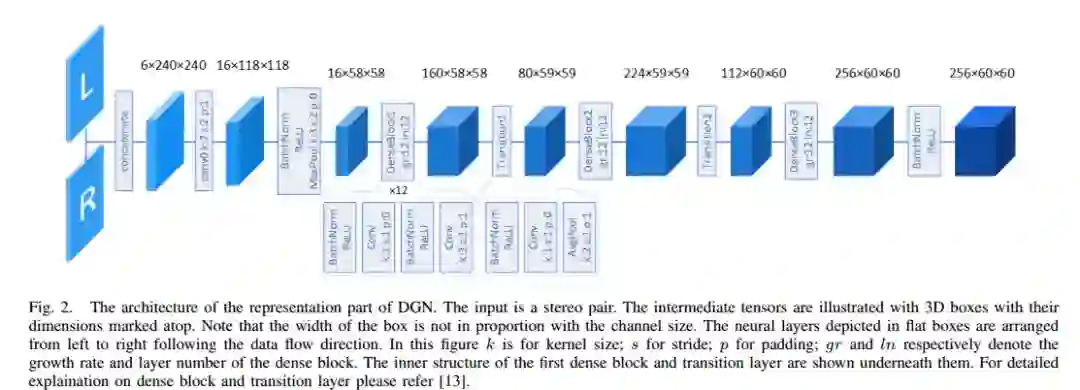
Depth Generation Network: Estimating Real World Depth from Stereo and Depth Images(左右图生成深度图网络)
Keywords: AI-Based Methods, RGB-D Perception, Range Sensing
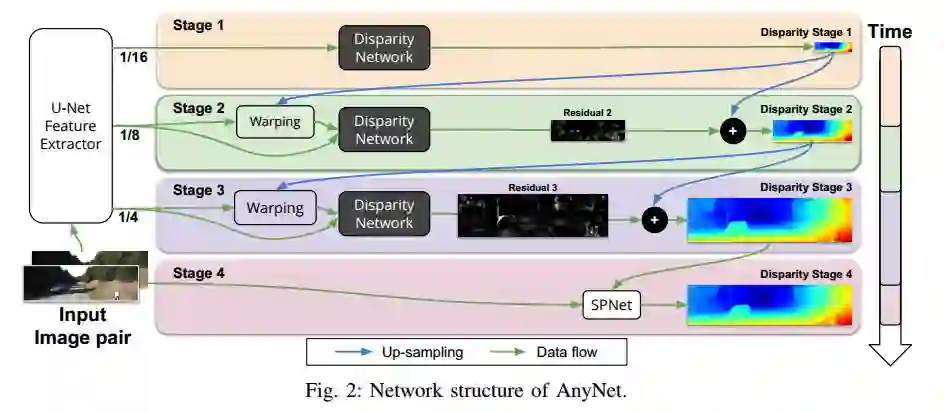
Anytime Stereo Image Depth Estimation on Mobile Devices(双目深度图匹配计算方法,快速)
Keywords: Deep Learning in Robotics and Automation, Computer Vision for Automation, Computer Vision for Other Robotic Applications
代码
https://github.com/mileyan/AnyNet
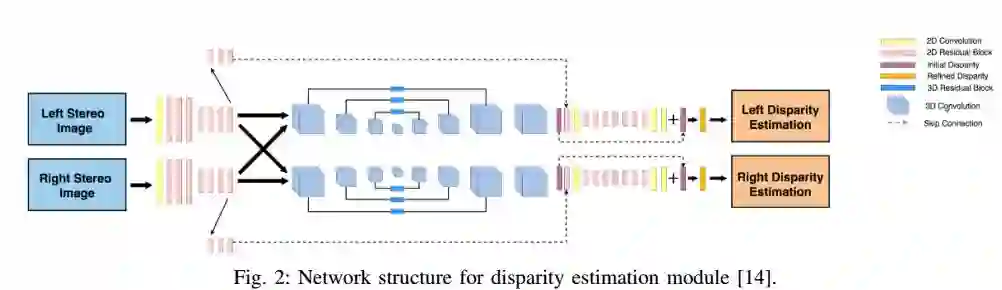
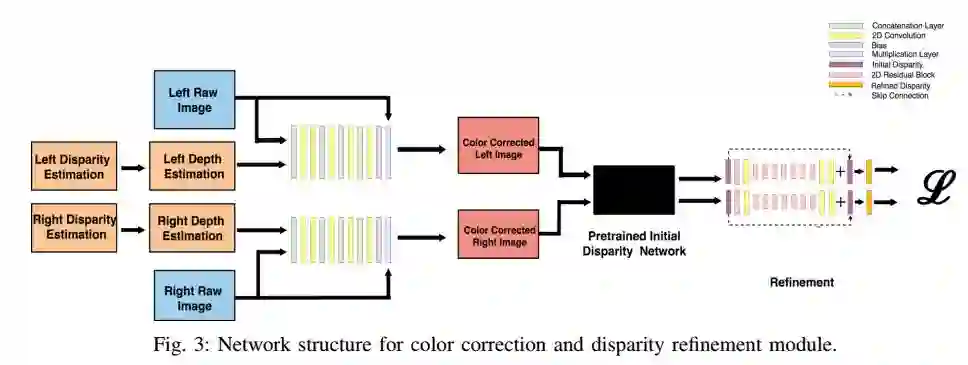
UWStereoNet: Unsupervised Learning for Depth Estimation and Color Correction of Underwater Stereo Imagery(深度学习的双目立体匹配)
Keywords: Marine Robotics, Deep Learning in Robotics and Automation, Computer Vision for Other Robotic Applications
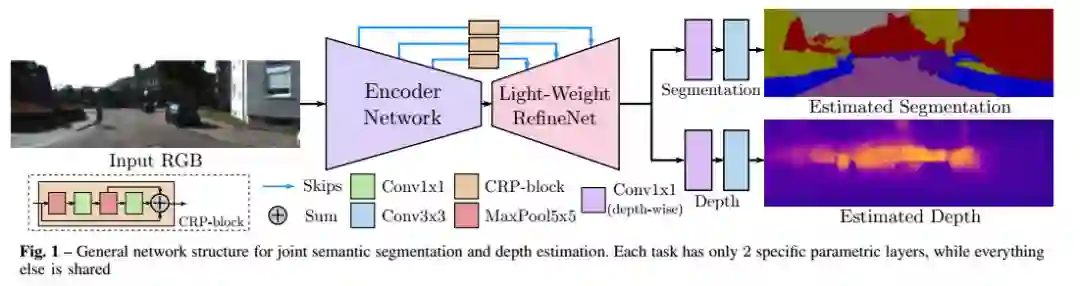
Real-Time Joint Semantic Segmentation and Depth Estimation Using Asymmetric Annotations(深度学习语义和深度的分割网络)
Keywords: Visual Learning, Semantic Scene Understanding, SLAM
代码
https://github.com/DrSleep/multi-task-refinenet
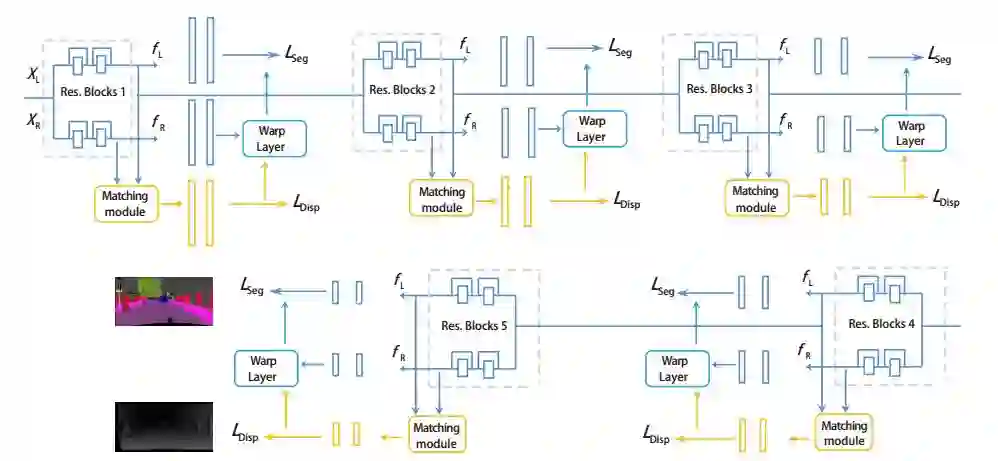
DSNet: Joint Learning for Scene Segmentation and Disparity Estimation(深度学习左右图估计语义分割和深度图)
Keywords: Semantic Scene Understanding, Deep Learning in Robotics and Automation, Object Detection, Segmentation and Categorization
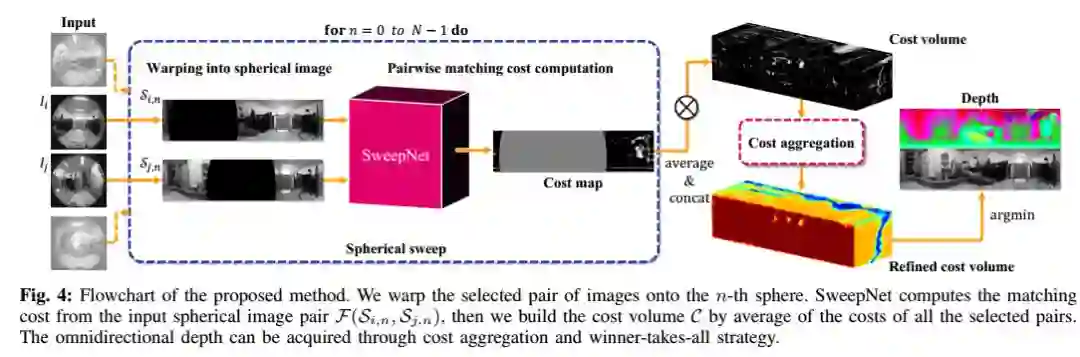
SweepNet: Wide-Baseline Omnidirectional Depth Estimation(宽基线,多摄像头的深度估计方法)
Keywords: Omnidirectional Vision, Computer Vision for Automation, Deep Learning in Robotics and Automation
A Supervised Approach to Predicting Noise in Depth Images(预测深度图的噪声区域)
Keywords: RGB-D Perception, Perception for Grasping and Manipulation, Deep Learning in Robotics and Automation

5. Point Cloud Segmentation
SqueezeSegV2: Improved Model Structure and Unsupervised Domain Adaptation for Road-Object Segmentation from a LiDAR Point Cloud (深度学习,雷达数据分割路面上的物体)
Keywords: Object Detection, Segmentation and Categorization, Semantic Scene Understanding, AI-Based Methods
https://github.com/BichenWuUCB/SqueezeSeg
https://github.com/xuanyuzhou98/SqueezeSegV2
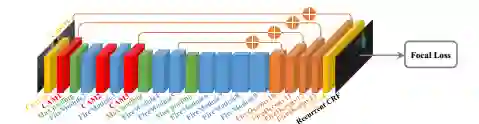
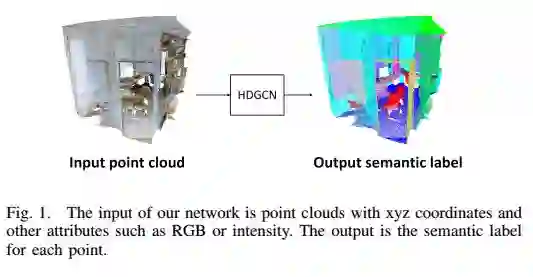
Hierarchical Depthwise Graph Convolutional Neural Network for 3D Semantic Segmentation of Point Clouds(点云语义分割方法)
Keywords: Semantic Scene Understanding, AI-Based Methods, RGB-D Perception
6. Autonomous Vehicle
Learning to Drive from Simulation without Real World Labels(自动驾驶中的学习方法)
Keywords: Deep Learning in Robotics and Automation, Visual Learning, Learning from Demonstration

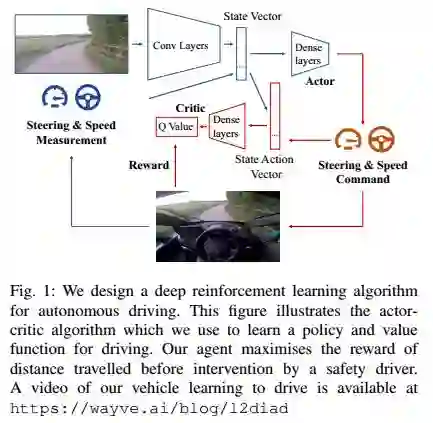
Learning to Drive in a Day(强化学习的自动驾驶)
Keywords: AI-Based Methods, Deep Learning in Robotics and Automation, Computer Vision for Transportation
Building a Winning Self-Driving Car in Six Months(与Uber 合作的自动驾驶平台)
Keywords: Autonomous Vehicle Navigation, Intelligent Transportation Systems, Computer Vision for Transportation
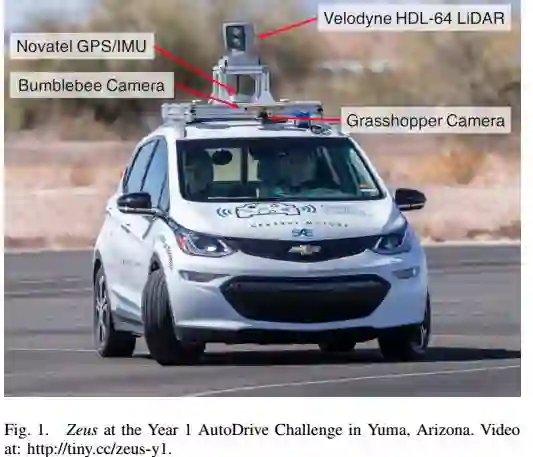
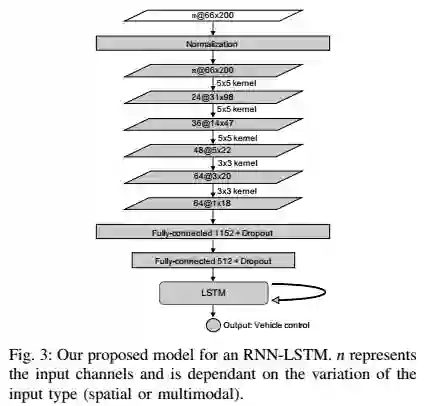
Multimodal Spatio-Temporal Information in End-To-End Networks for Automotive Steering Prediction (BMW合作的自动驾驶)
Keywords: Autonomous Vehicle Navigation, Deep Learning in Robotics and Automation, Visual Learning
Monocular Semantic Occupancy Grid Mapping with Convolutional Variational Encoder-Decoder Networks——IRAL(单目图生成避障图)
Keywords: Semantic Scene Understanding, Object Detection, Segmentation and Categorization, Computer Vision for Transportation

交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、算法竞赛、图像检测分割、人脸人体、医学影像、自动驾驶、综合等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

从零开始学习三维视觉核心技术SLAM,扫描查看介绍,3天内无条件退款

如有AI领域实习、求职、招聘、项目合作、咨询服务等需求,快来加入我们吧,期待和你建立连接,找人找技术不再难!
推荐阅读
ICRA 2019 论文速览 | SLAM 爱上 Deep Learning
ICRA 2019 论文速览 | 传统SLAM、三维视觉算法进展
从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
最新AI干货,我在看




