ICRA 2019 论文速览 | 传统SLAM、三维视觉算法进展
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
笔者汇总了ICRA 2019 SLAM相关论文,总共分为四个部分:
Deep learning + traditional SLAM,见 ICRA 2019 论文速览 | SLAM 爱上 Deep Learning
Deep learning based SLAM
Traditional SLAM/3D vision
SLAM evaluation and datasets
本文介绍:Traditional SLAM
1. SLAM——Direct, 2D/3D feature, Lidar SLAM
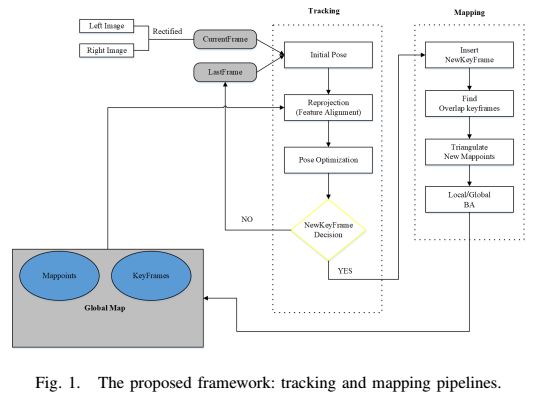
FMD Stereo SLAM: Fusing MVG and Direct Formulation towards Accurate and Fast Stereo SLAM(中科院,特征点法和直接法结合)
Keywords: SLAM, Localization, Mapping
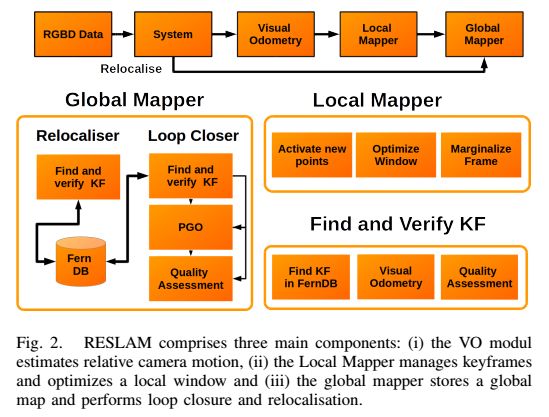
RESLAM: A Real-Time Robust Edge-Based SLAM System (边缘SLAM)
Keywords: SLAM, Visual-Based Navigation, RGB-D Perception
代码:
https://github.com/fabianschenk/RESLAM
https://github.com/fabianschenk/REVO
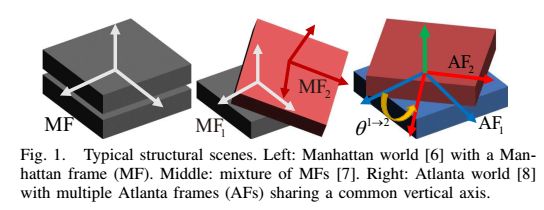
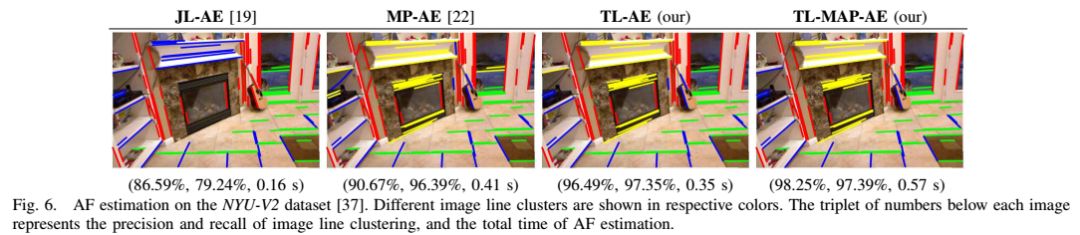
Leveraging Structural Regularity of Atlanta World for Monocular SLAM(Atlanta世界坐标系下的边缘线约束SLAM)
Keywords: SLAM, Localization, Mapping
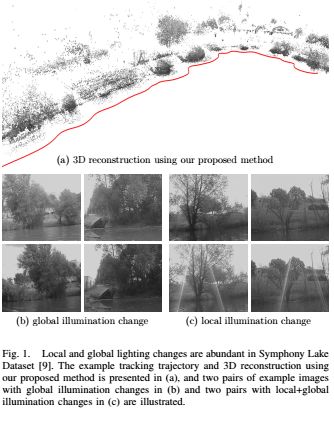
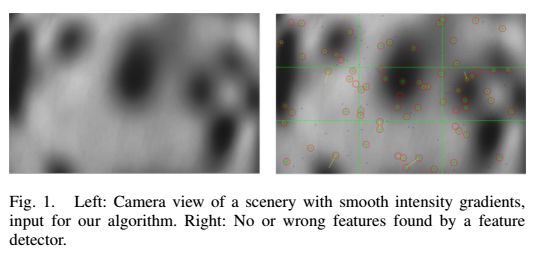
Illumination Robust Monocular Direct Visual Odometry for Outdoor Environment Mapping(抗光照变化的直接法视觉里程计)
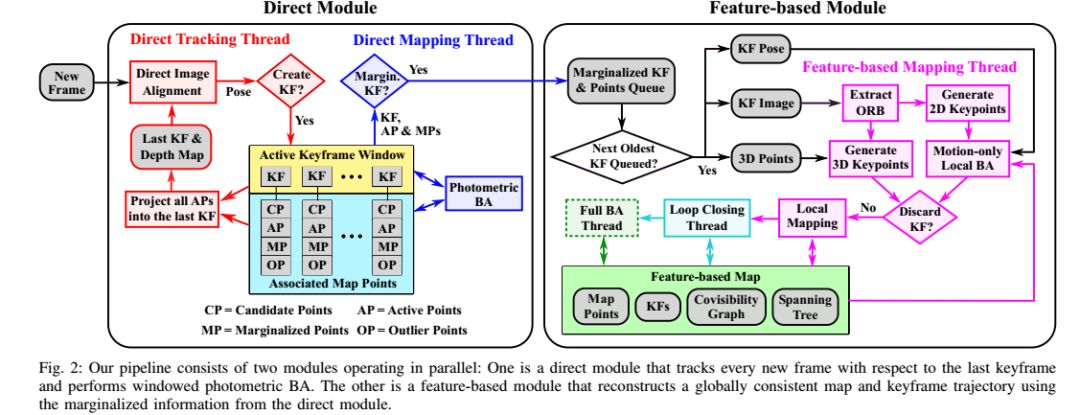
Loosely-Coupled Semi-Direct Monocular SLAM——IRAL(直接法跟踪,特征点法做地图优化和回环)
Keywords: SLAM, Localization, Mapping
代码
https://github.com/sunghoon031/LCSD_SLAM
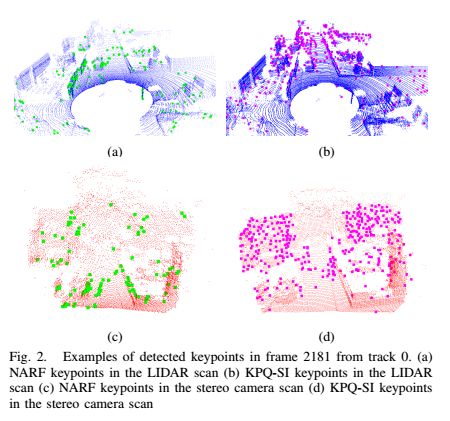
3D Keypoint Repeatability for Heterogeneous Multi-Robot SLAM(多机器人系统的不同传感器的特征点匹配,3D关键点KPQ-SI和NARF两个特征点比较适合用于Loopclosure和多机器人重定位中)
Keywords: SLAM, Performance Evaluation and Benchmarking, Mapping
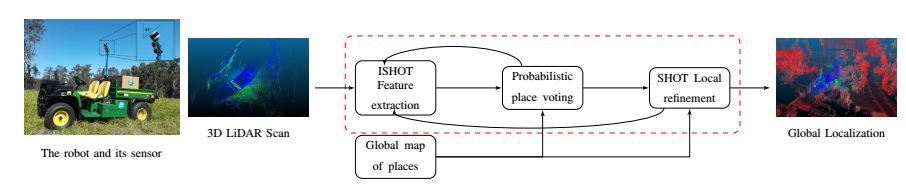
Local Descriptor for Robust Place Recognition Using LiDAR Intensity——IRAL (ISHOT点云描述子用于定位)
Keywords: Localization, Field Robots, Autonomous Vehicle Navigation
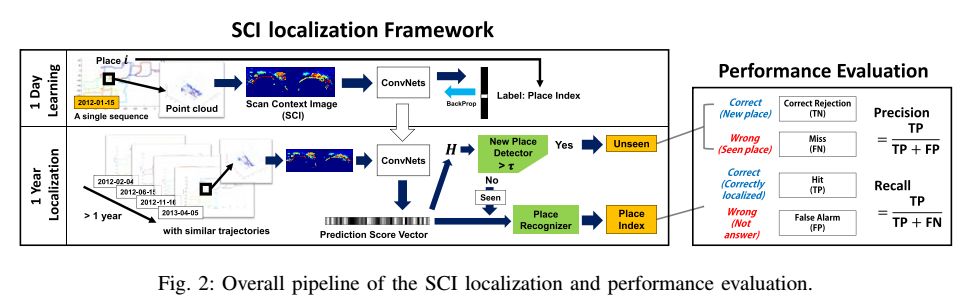
1-Day Learning, 1-Year Localization: Long-Term LiDAR Localization Using Scan Context Image——IRAL(激光雷达的长期定位方法)
Keywords: Localization, Range Sensing, SLAM
2. SLAM——Pose Optimization
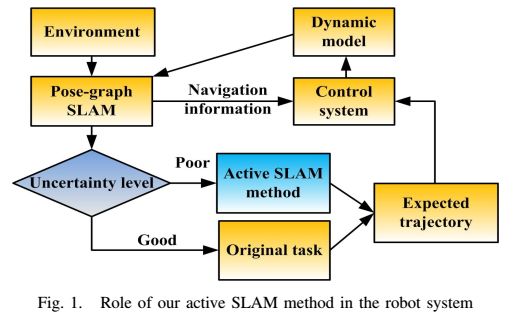
On-Line 3D Active Pose-Graph SLAM Based on Key Poses Using Graph Topology and Sub-Maps(位姿优化,子地图)
Keywords: SLAM, Motion and Path Planning
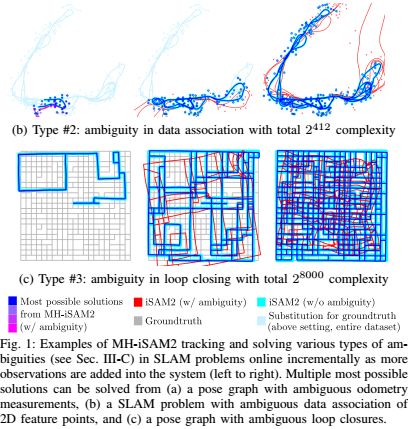
MH-iSAM2: Multi-Hypothesis iSAM Using Bayes Tree and Hypo-Tree(非线性增量优化,解决SLAM歧义)
Keywords: SLAM, Localization, Mapping
Visual SLAM: Why Bundle Adjust?(BA的替代优化方法,解决纯旋转和弱平移下的位姿估计)
Keywords: SLAM
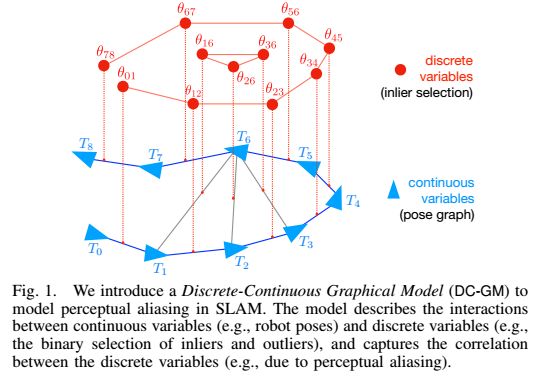
Modeling Perceptual Aliasing in SLAM Via Discrete-Continuous Graphical Models——IRAL (离散连续图模型的优化方法)
Keywords: SLAM, Sensor Fusion, Optimization and Optimal Control
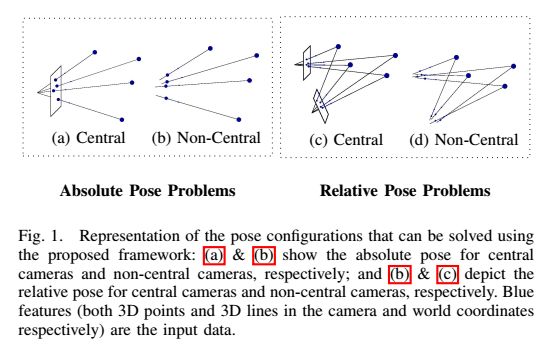
POSEAMM: A Unified Framework for Solving Pose Problems Using an Alternating Minimization Method(使用交替最小化方法解决姿势优化问题的统一框架)
Keywords: Computer Vision for Automation, Omnidirectional Vision, Localization
Visual-Odometric Localization and Mapping for Ground Vehicles Using SE(2)-XYZ Constraints(平面移动机器人的位姿估计约束模型)
Keywords: Localization, SLAM, Sensor Fusion
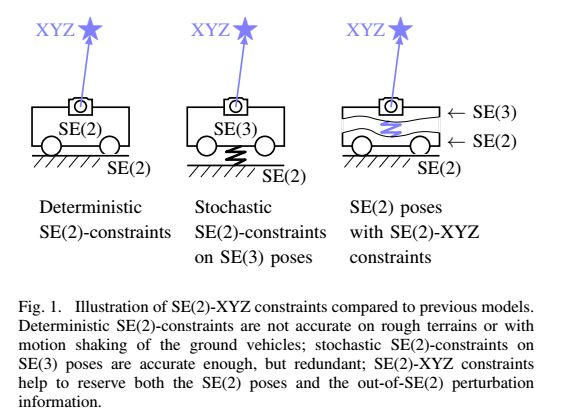
https://github.com/izhengfan/se2lam
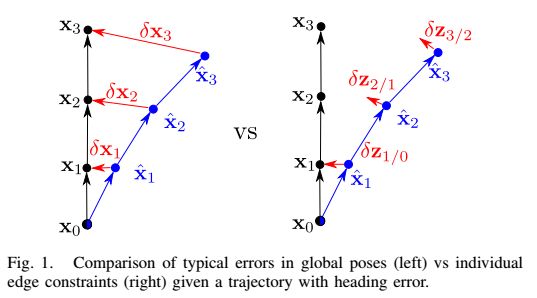
Direct Relative Edge Optimization, a Robust Alternative for Pose Graph Optimization(边缘约束的图优化)
Keywords: SLAM, Mapping, Multi-Robot Systems
A White-Noise-On-Jerk Motion Prior for Continuous-Time Trajectory Estimation on SE(3) (位姿估计方法)
Keywords: SLAM
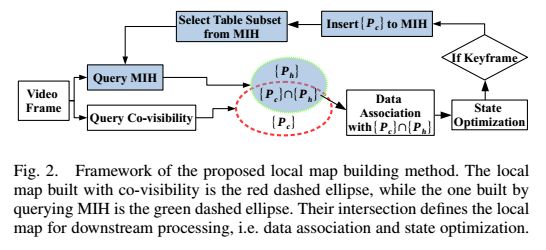
Low-Latency Visual SLAM with Appearance-Enhanced Local Map Building(一种快速局部地图的策略)
Keywords: SLAM
3. SLAM——VIO/ VISLAM
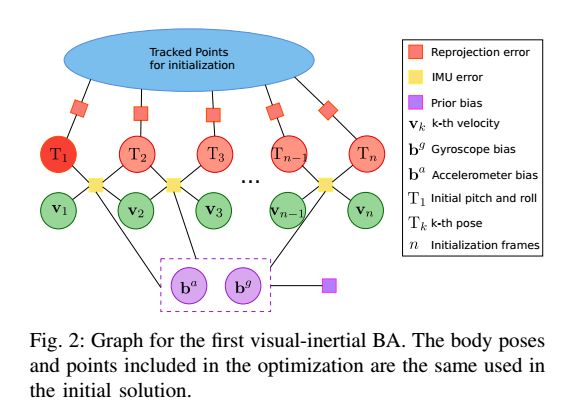
Fast and Robust Initialization for Visual-Inertial SLAM(VINS初始化)
Keywords: SLAM, Mapping, Localization
Visual-Inertial Navigation: A Concise Review
Keywords: Autonomous Vehicle Navigation, Localization, Sensor Fusion
https://github.com/rpng
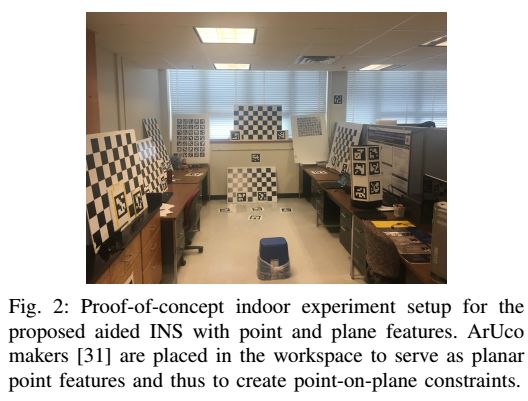
Tightly-Coupled Aided Inertial Navigation with Point and Plane Features(点面特征的VINS系统)
Keywords: Range Sensing, Sensor Fusion, SLAM
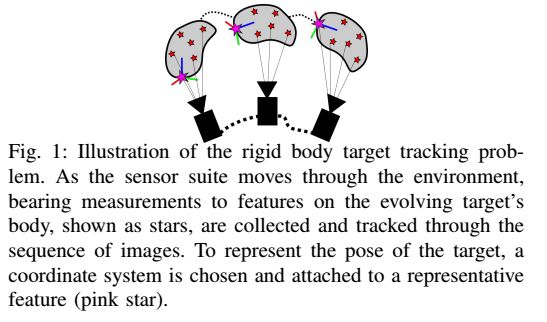
Tightly-Coupled Visual-Inertial Localization and 3D Rigid-Body Target Tracking——IRAL(VINS和跟踪物体紧融合)
Keywords: Localization, Visual Tracking, SLAM
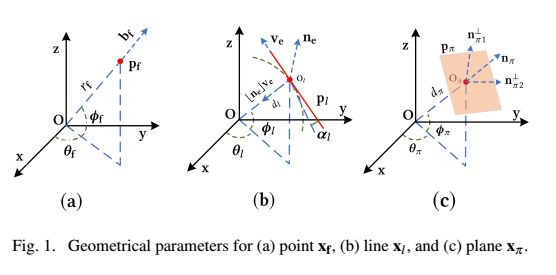
Aided Inertial Navigation: Unified Feature Representations and Observability Analysis(点,线,面多特征融合的VINS系统)
Keywords: Localization, SLAM, Visual-Based Navigation
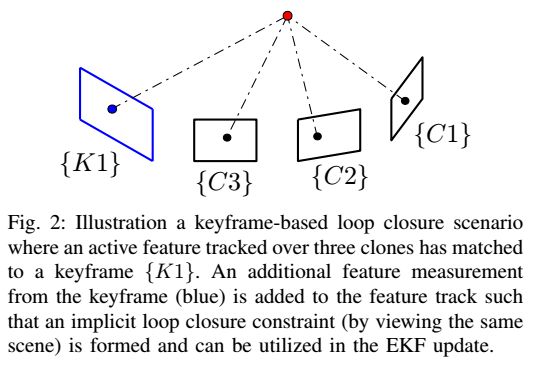
A Linear-Complexity EKF for Visual-Inertial Navigation with Loop Closures(一种MSCKF的VINS方法,带回环)
Keywords: Localization, SLAM, Mapping
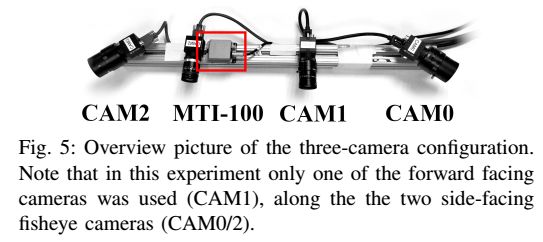
Multi-Camera Visual-Inertial Navigation with Online Intrinsic and Extrinsic Calibration(多相机VINS系统的在线标定相机,IMU内外参数方法)
Keywords: Visual-Based Navigation, Sensor Fusion, Localization
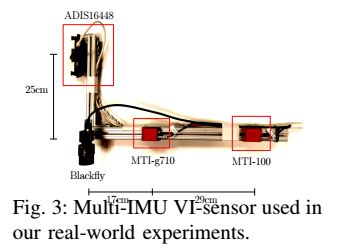
Sensor-Failure-Resilient Multi-IMU Visual-Inertial Navigation(一种多IMU的VINS系统)
Keywords: Localization, SLAM, Failure Detection and Recovery
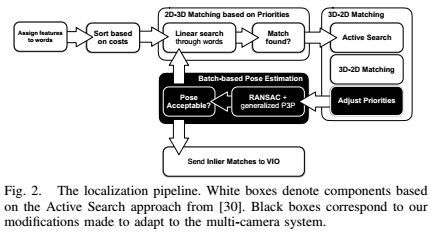
Efficient 2D-3D Matching for Multi-Camera Visual Localization(多camera imu的重定位)
Keywords: Localization, Computer Vision for Transportation, Omnidirectional Vision
Keyframe-Based Direct Thermal–Inertial Odometry(低质量图像下的VIO方法,基于关键帧的直接法,可以借鉴他借鉴低照度下的vo问题)
Keywords: Localization, Sensor Fusion, Field Robots
Improving the Robustness of Visual-Inertial Extended Kalman Filtering(VINS 系统姿态估计提升方案)
Keywords: Visual-Based Navigation, Aerial Systems: Perception and Autonomy, Robust/Adaptive Control of Robotic Systems
Towards Fully Dense Direct Filter-Based Monocular Visual-Inertial Odometry(密集直接法VINS系统)
Keywords: Sensor Fusion, Visual-Based Navigation, Localization
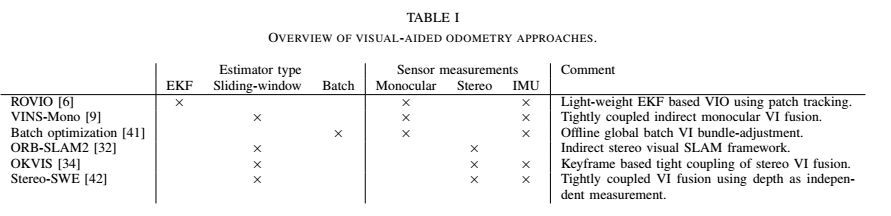
Experimental Comparison of Visual-Aided Odometry Methods for Rail Vehicles—IRAL (在火车的数据集上实验比对VO、VIO方法)
Keywords: Computer Vision for Transportation, Intelligent Transportation Systems, SLAM
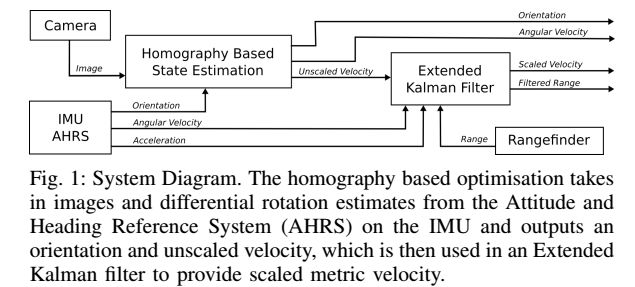
RaD-VIO: Rangefinder-Aided Downward Visual-Inertial Odometry(测距融合VIO)
Keywords: Aerial Systems: Perception and Autonomy, Localization, Performance Evaluation and Benchmarking
4. SLAM——Multi-sensor Fusion
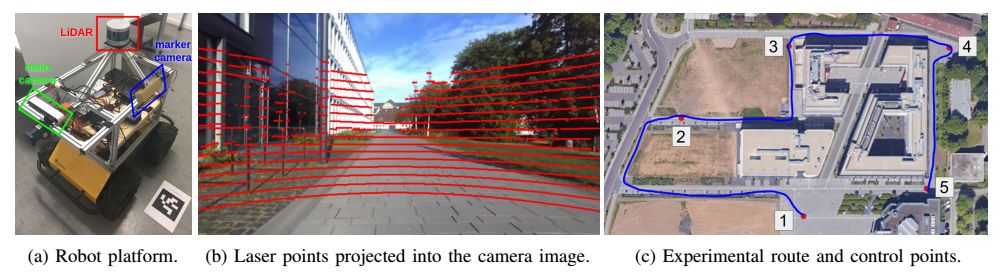
Accurate Direct Visual-Laser Odometry with Explicit Occlusion Handling and Plane Detection(激光雷达融合视觉定位,区分平面和非平面的特征点)
Keywords: SLAM, Localization
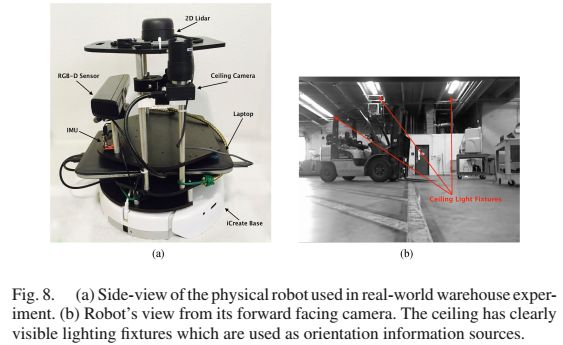
Robust Pose-Graph SLAM Using Absolute Orientation Sensing(激光雷达+天花板摄像头SLAM)
Keywords: SLAM, Industrial Robots
Tightly Coupled 3D Lidar Inertial Odometry and Mapping(雷达和IMU融合)
Keywords: Computer Vision for Automation, Sensor Fusion, SLAM
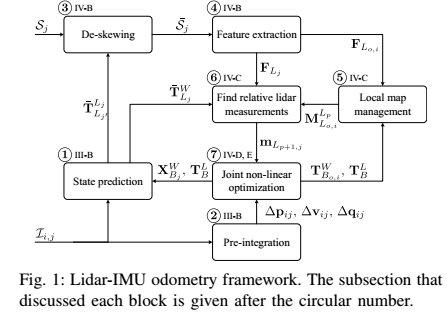
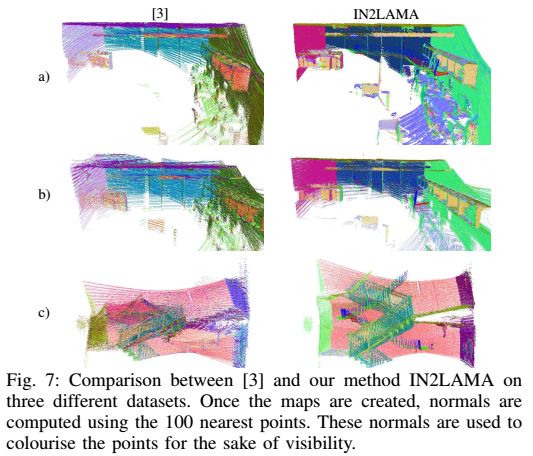
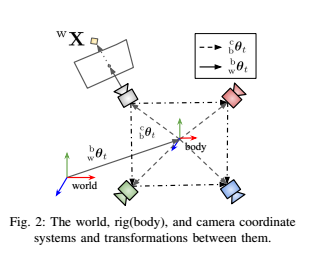
IN2LAMA: INertial Lidar Localisation and Mapping(IMU和Lidar融合的SLAM)
Keywords: Mapping, SLAM, Sensor Fusion
ROVO: Robust Omnidirectional Visual Odometry for Wide-Baseline Wide-FOV Camera Systems(多鱼眼SLAM)
Keywords: SLAM, Omnidirectional Vision, Autonomous Vehicle Navigation
5. Depth & Mapping & 3D Reconstruction
ScalableFusion: High-Resolution Mesh-Based Real-Time 3D Reconstruction(三维重建)
Keywords: SLAM, Mapping, RGB-D Perception
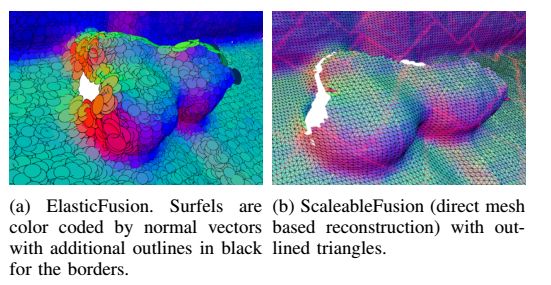
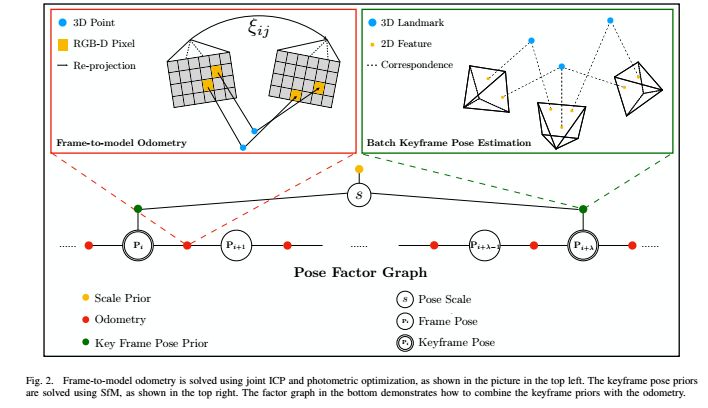
Surfel-Based Dense RGB-D Reconstruction with Global and Local Consistency(用SFM计算全局的关键帧位姿,同时用slam方法计算局部相邻帧的位姿,然后用FGO factor graph optimization方法将全局和局部信息融合计算出密集三维重建)
Keywords: SLAM, Localization, Mapping
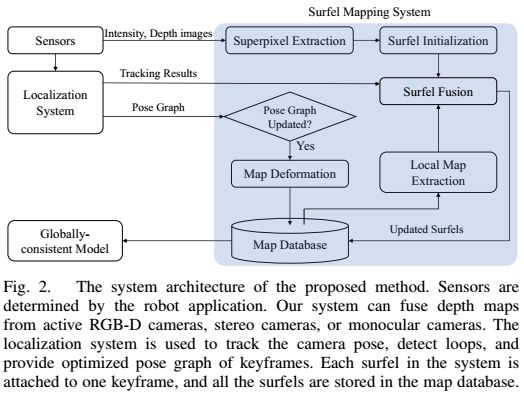
Real-Time Scalable Dense Surfel Mapping
Keywords: Mapping, Sensor Fusion, Aerial Systems: Perception and Autonomy
代码
https://github.com/HKUST-Aerial-Robotics/DenseSurfelMapping
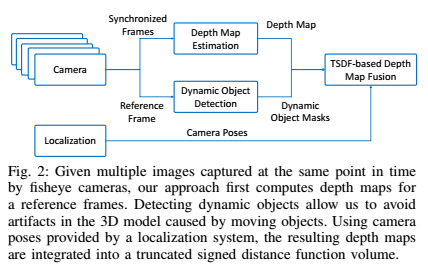
Real-Time Dense Mapping for Self-Driving Vehicles Using Fisheye Cameras(鱼眼相机的密集三维重建)
Keywords: Mapping, Computer Vision for Transportation, Omnidirectional Vision
https://zhpcui.github.io/projects/arxiv18_densemapping/
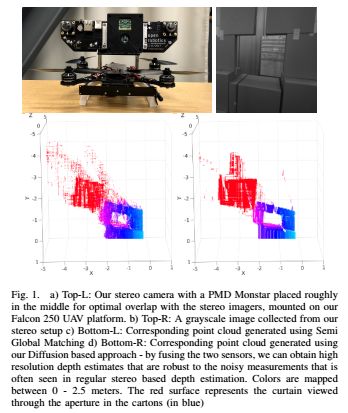
Real Time Dense Depth Estimation by Fusing Stereo with Sparse Depth Measurements(用TOF辅助双目密集匹配算法)
Keywords: Range Sensing, Aerial Systems: Perception and Autonomy
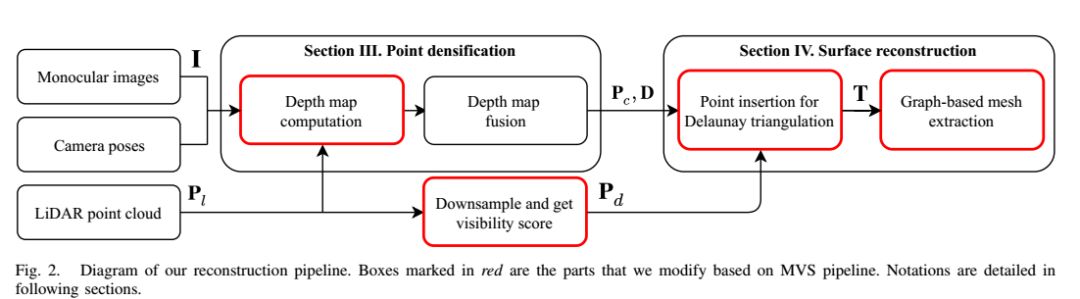
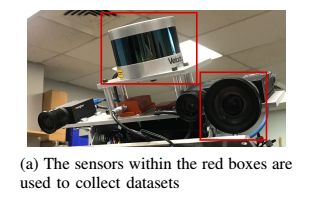
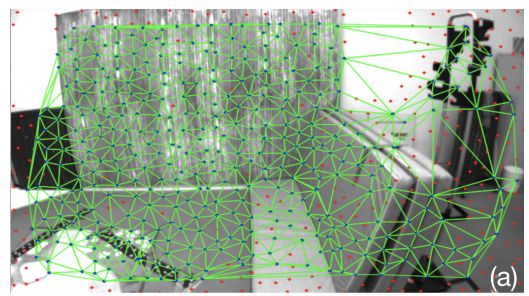
Dense Surface Reconstruction from Monocular Vision and LiDAR(雷达和视觉融合三维重建)
Keywords: Mapping, SLAM, Range Sensing
Incremental Visual-Inertial 3D Mesh Generation with Structural Regularities(VIO输出的稀疏点做三维重建的三角面片)
Keywords: SLAM, Visual-Based Navigation, Sensor Fusion
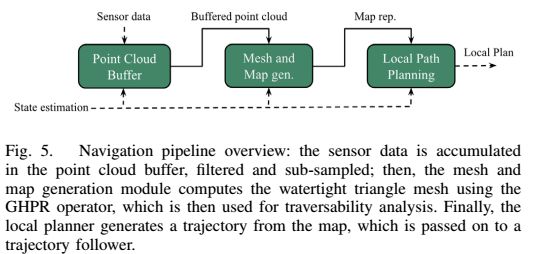
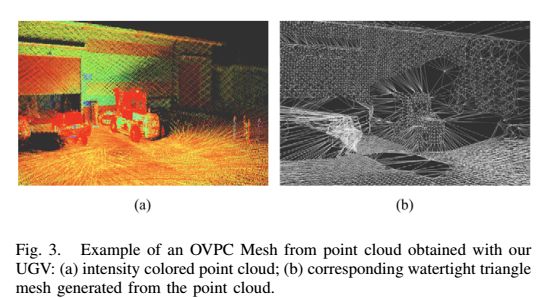
OVPC Mesh: 3D Free-Space Representation for Local Ground Vehicle Navigation(3D Mesh表示方法,用于无人车避障)
Keywords: Autonomous Vehicle Navigation, Field Robots, Mapping
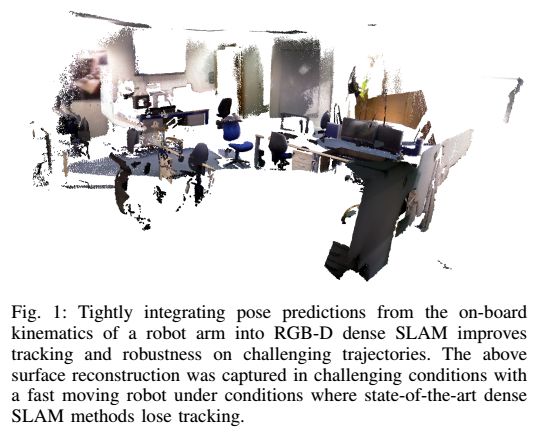
KO-Fusion: Dense Visual SLAM with Tightly-Coupled Kinematic and Odometric Tracking(机器人运动学与里程计结合的密集三维重建)
Keywords: SLAM, Sensor Fusion, Kinematics
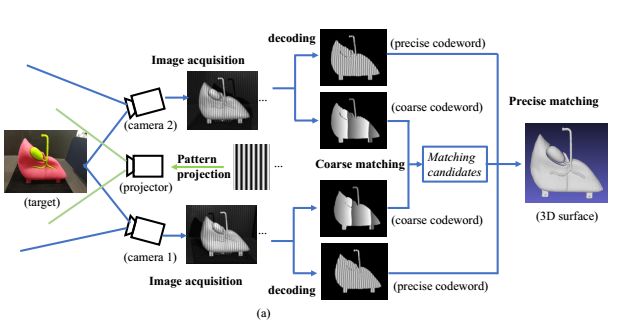
3D Surface Reconstruction Using a Two-Step Stereo Matching Method Assisted with Five Projected Patterns(三维双目结构光重建设备)
Keywords: Computer Vision for Automation, Range Sensing, Computer Vision for Other Robotic Applications
6. Localization——Lidar / Vision
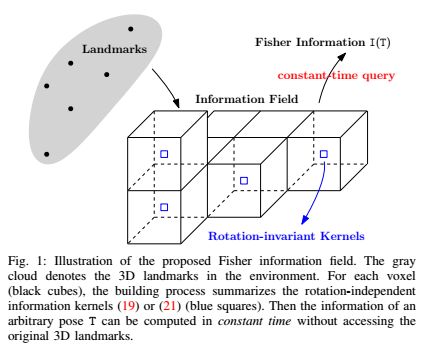
Beyond Point Clouds: Fisher Information Field for Active Visual Localization(3D landmark来做视觉定位)
Keywords: Visual-Based Navigation, Localization, Motion and Path Planning
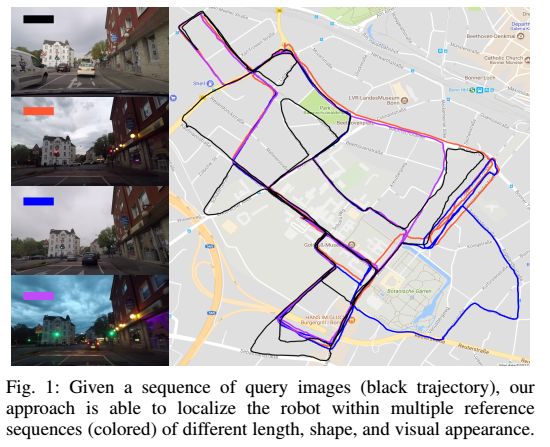
Effective Visual Place Recognition Using Multi-Sequence Maps—IRAL(场景识别定位)
Keywords: Localization
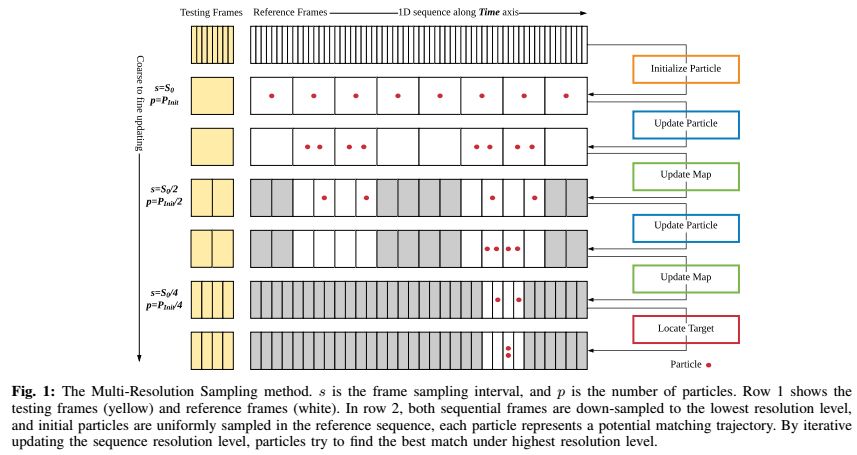
MRS-VPR: A Multi-Resolution Sampling Based Visual Place Recognition Method(场景识别和回环检测,高效、多尺度、粗到细的长期序列VPR)
Keywords: SLAM, Deep Learning in Robotics and Automation, Visual Learning
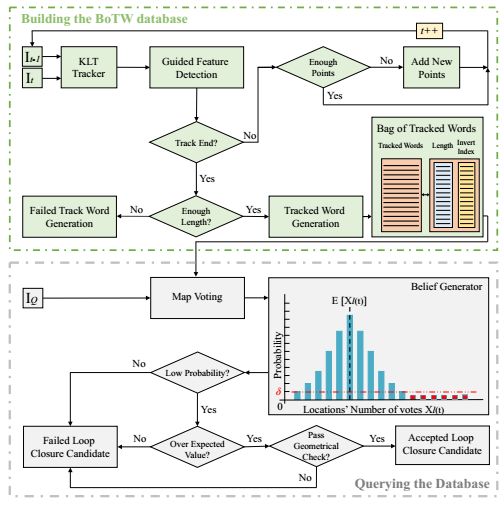
Probabilistic Appearance-Based Place Recognition through Bag of Tracked Words——IRAL (BTW场景定位)
Keywords: SLAM, Visual-Based Navigation, Recognition
Geometric Relation Distribution for Place Recognition——IRAL(激光雷达的重定位和回环)
Keywords: Mapping, Localization, Range Sensing
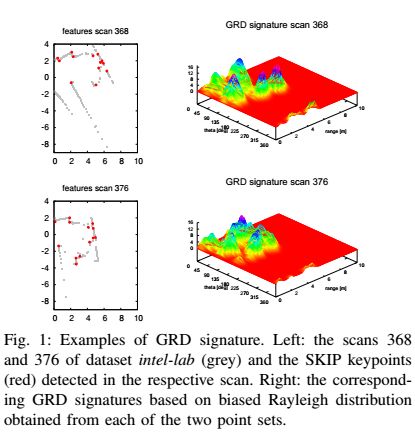
代码
https://github.com/dlr1516/grd
7. Others
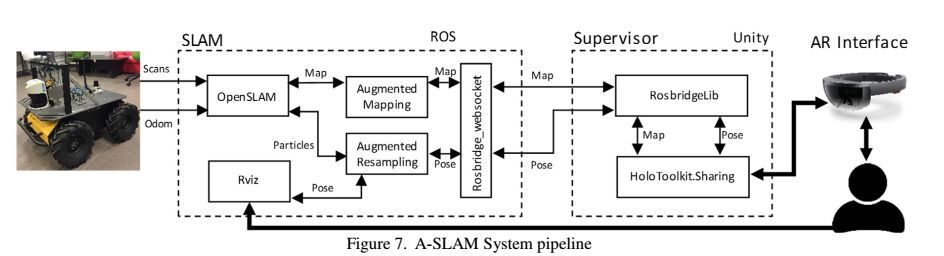
A-SLAM: Human-In-The-Loop Augmented SLAM(交互式SLAM地图和位姿修正方法)
Keywords: SLAM, Virtual Reality and Interfaces, Wheeled Robots
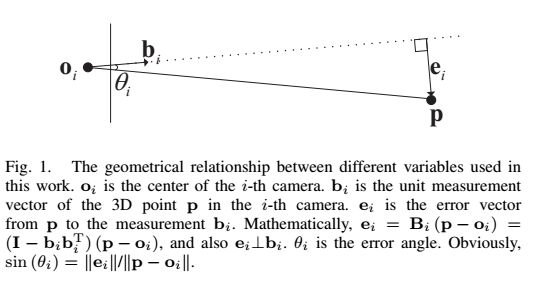
Iteratively Reweighted Midpoint Method for Fast Multiple View Triangulation——IRAL (三角化误差消除方法)
Keywords: SLAM, Mapping
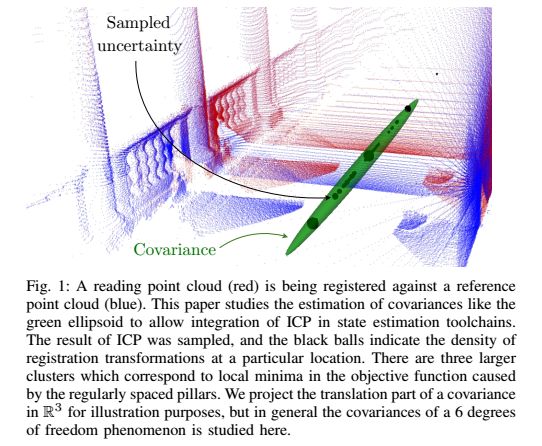
CELLO-3D: Estimating the Covariance of ICP in the Real World(点云ICP)
Keywords: SLAM, Range Sensing, Learning and Adaptive Systems
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、算法竞赛、图像检测分割、人脸人体、医学影像、自动驾驶、综合等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

从零开始学习三维视觉核心技术SLAM,扫描查看介绍,3天内无条件退款

如有AI领域实习、求职、招聘、项目合作、咨询服务等需求,快来加入我们吧,期待和你建立连接,找人找技术不再难!
推荐阅读
从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
最新AI干货,我在看





