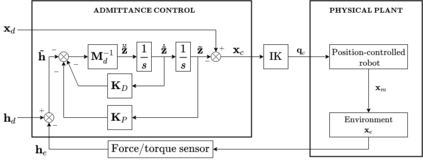
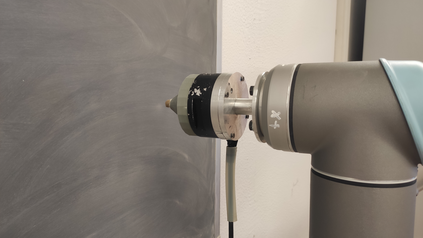
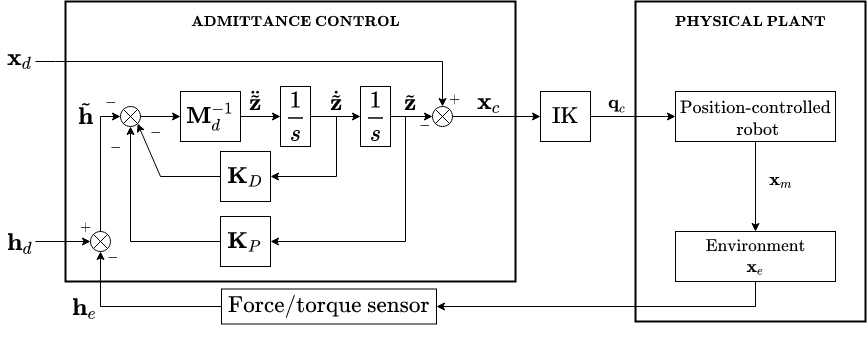
Optimal motion planning along prescribed paths can be solved with several techniques, but most of them do not take into account the wrenches exerted by the end-effector when in contact with the environment. When a dynamic model of the environment is not available, no consolidated methodology exists to consider the effect of the interaction. Regardless of the specific performance index to optimize, this article proposes a strategy to include external wrenches in the optimal planning algorithm, considering the task specifications. This procedure is instantiated for minimum-time trajectories and validated on a real robot performing an interaction task under admittance control. The results prove that the inclusion of end-effector wrenches affect the planned trajectory, in fact modifying the manipulator's dynamic capability.
翻译:沿指定路径的最佳运动规划可以采用几种技术来解决,但大多数技术没有考虑到与环境接触时终端效应器的扳手。当环境的动态模型不存在时,没有综合的方法来考虑相互作用的效果。无论需要优化的具体性能指数如何,本条提议了一项战略,将外部扳手纳入最佳规划算法,同时考虑到任务规格。这一程序是针对最短时间轨迹的即时操作程序,并在接受控制下执行互动任务的真正机器人上验证。结果证明,包含终端效应扳手会影响计划轨迹,事实上会改变操纵者的动态能力。