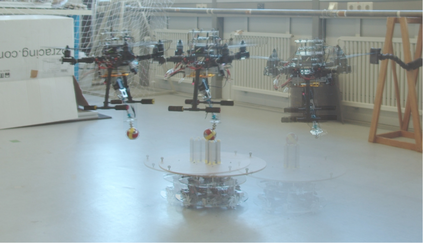
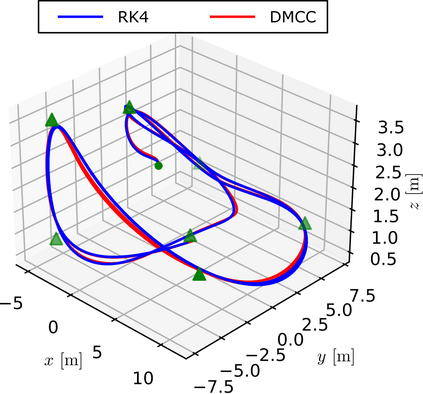
Planning a time-optimal trajectory for aerial robots is critical in many drone applications, such as rescue missions and package delivery, which have been widely researched in recent years. However, it still involves several challenges, particularly when it comes to incorporating special task requirements into the planning as well as the aerial robot's dynamics. In this work, we study a case where an aerial manipulator shall hand over a parcel from a moving mobile robot in a time-optimal manner. Rather than setting up the approach trajectory manually, which makes it difficult to determine the optimal total travel time to accomplish the desired task within dynamic limits, we propose an optimization framework, which combines discrete mechanics and complementarity constraints (DMCC) together. In the proposed framework, the system dynamics is constrained with the discrete variational Lagrangian mechanics that provides reliable estimation results also according to our experiments. The handover opportunities are automatically determined and arranged based on the desired complementarity constraints. Finally, the performance of the proposed framework is verified with numerical simulations and hardware experiments with our self-designed aerial manipulators.
翻译:为空中机器人规划一个最理想的飞行轨迹在许多无人机应用中至关重要,例如救援任务和包裹运送,近年来已经进行了广泛研究。然而,它仍涉及若干挑战,特别是在将特殊任务要求纳入规划和空中机器人动态方面。在这项工作中,我们研究一个案例,即空中操纵者应以最理想的时间方式从移动的移动机器人上交出包裹包裹。与其手工设置方法轨迹,从而难以确定在动态限度内完成所期望任务的最佳总旅行时间,我们提议了一个优化框架,将离散机械和互补制约(DMCC)结合起来。在拟议框架中,系统动态与独立变异拉格朗吉亚机械(Lagrangian机械,根据我们的实验提供可靠的估计结果)受到制约。移交机会根据理想的互补性限制自动确定和安排。最后,拟议框架的执行情况通过数字模拟和与我们自设计的空中操纵器的硬件实验加以验证。