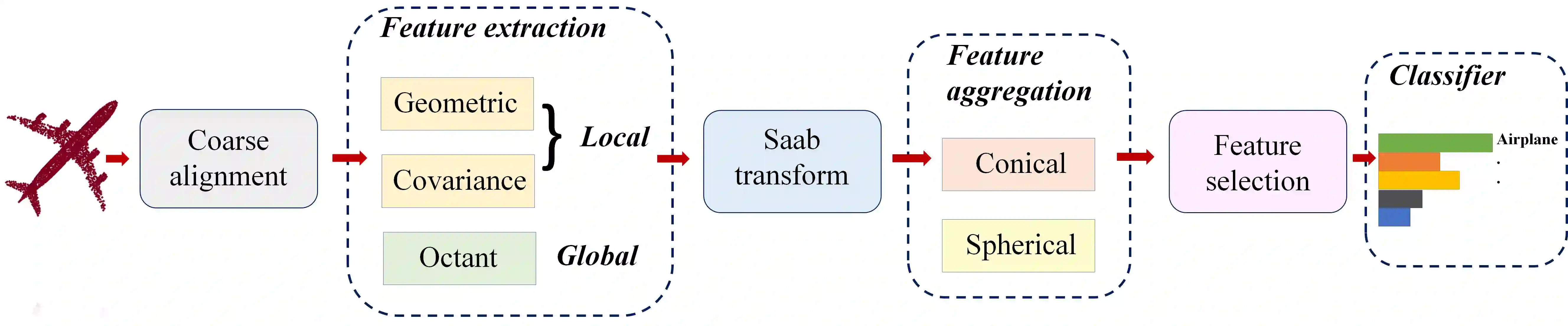
Many point cloud classification methods are developed under the assumption that all point clouds in the dataset are well aligned with the canonical axes so that the 3D Cartesian point coordinates can be employed to learn features. When input point clouds are not aligned, the classification performance drops significantly. In this work, we focus on a mathematically transparent point cloud classification method called PointHop, analyze its reason for failure due to pose variations, and solve the problem by replacing its pose dependent modules with rotation invariant counterparts. The proposed method is named SO(3)-Invariant PointHop (or S3I-PointHop in short). We also significantly simplify the PointHop pipeline using only one single hop along with multiple spatial aggregation techniques. The idea of exploiting more spatial information is novel. Experiments on the ModelNet40 dataset demonstrate the superiority of S3I-PointHop over traditional PointHop-like methods.
翻译:许多点云分类方法是在以下假设下制定的:数据集中的所有点云都与罐形轴完全一致,因此3D笛卡尔点坐标可以用于学习特征。当输入点云不对齐时,分类性能会显著下降。在这项工作中,我们侧重于数学透明的点云分类方法,称为PointHop,分析其造成变化的失败原因,并通过用旋转不定的对等方替换其构成的依附模块来解决问题。提议的方法名为SO(3)-Invoriant PointHop(简称为S3I-PointHop ) 。我们还大大简化了点Hop管道,只使用一个单跳和多个空间汇总技术。利用更多空间信息的想法是新颖的。模型Net40数据集实验显示S3I-PointHop优于传统的PointHop方法。