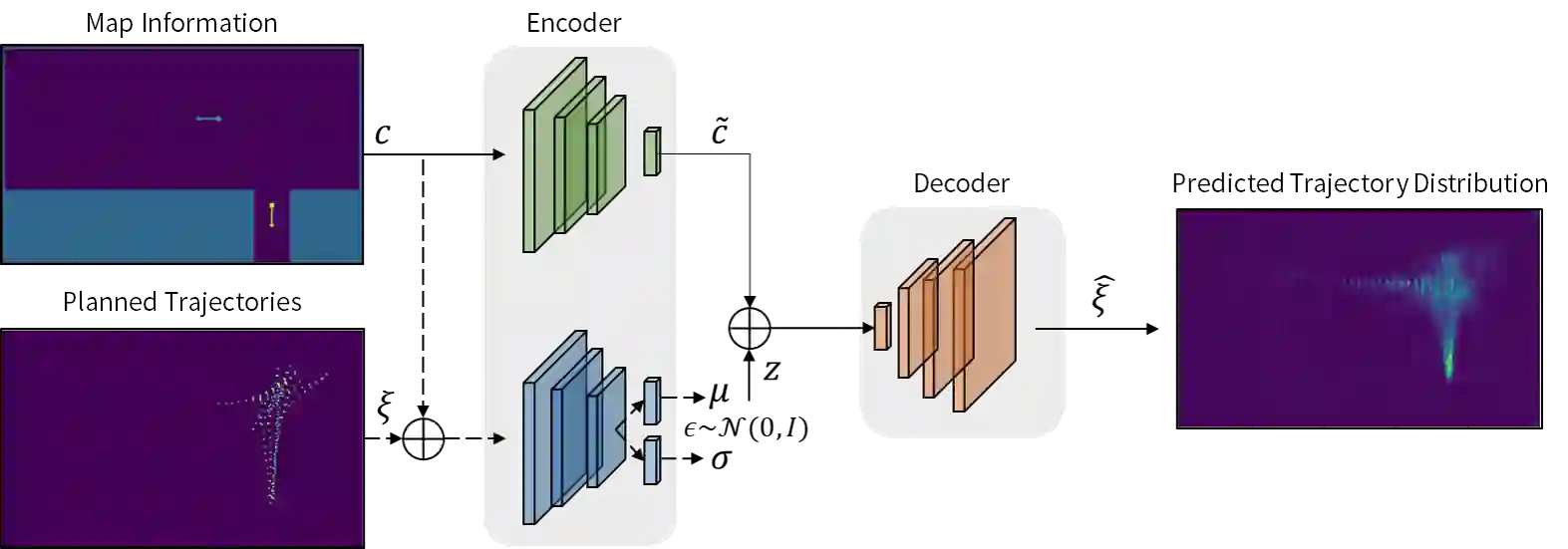
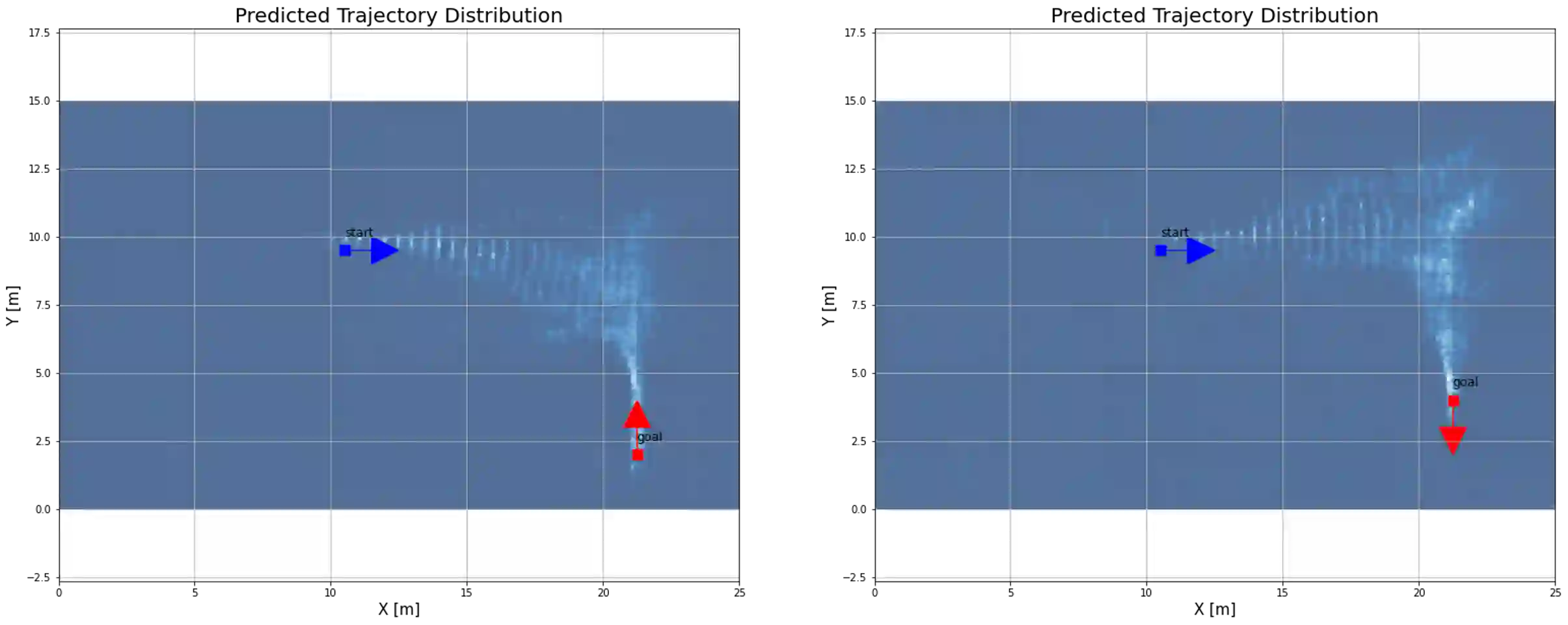
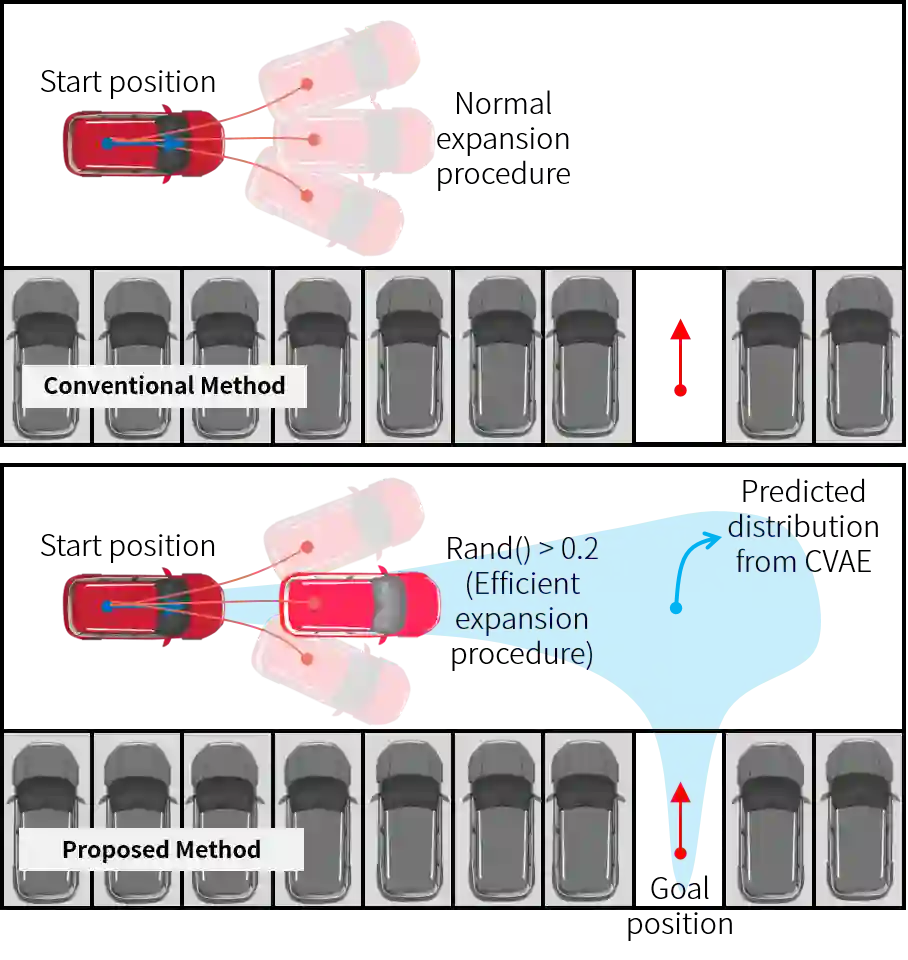
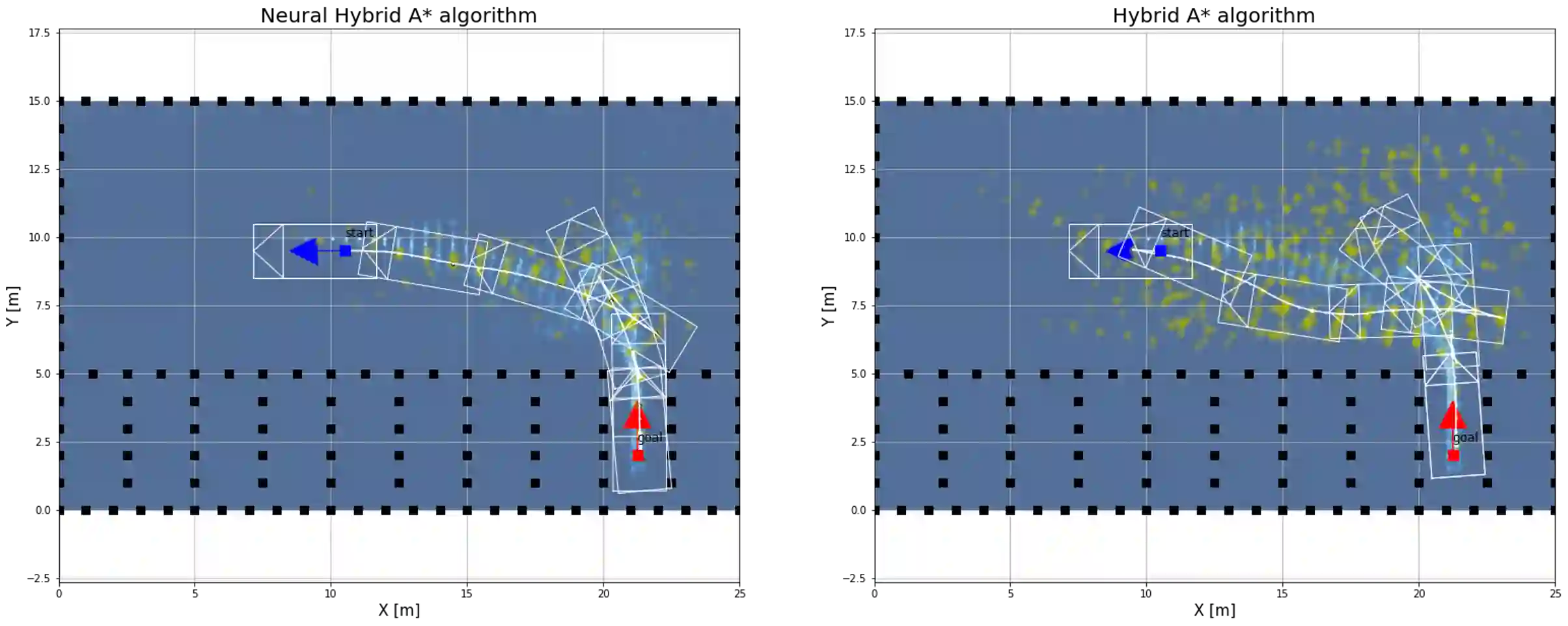
This paper presents a hybrid motion planning strategy that combines a deep generative network with a conventional motion planning method. Existing planning methods such as A* and Hybrid A* are widely used in path planning tasks because of their ability to determine feasible paths even in complex environments; however, they have limitations in terms of efficiency. To overcome these limitations, a path planning algorithm based on a neural network, namely the neural Hybrid A*, is introduced. This paper proposes using a conditional variational autoencoder (CVAE) to guide the search algorithm by exploiting the ability of CVAE to learn information about the planning space given the information of the parking environment. A non-uniform expansion strategy is utilized based on a distribution of feasible trajectories learned in the demonstrations. The proposed method effectively learns the representations of a given state, and shows improvement in terms of algorithm performance.
翻译:本文件介绍了一种混合运动规划战略,将深层基因网络与常规运动规划方法结合起来。现有的A*和混合A*等规划方法由于即使在复杂环境中也能够确定可行的路径,因此被广泛用于路径规划任务;然而,在效率方面,它们也有局限性。为克服这些局限性,本文件采用了基于神经网络的路径规划算法,即神经混合A*。本文件提议使用一种有条件的变异自动编码器(CVAE)来指导搜索算法,利用CVAE的能力来学习根据停车环境信息提供的关于规划空间的信息。非统一的扩展战略利用了基于在演示中所学到的可行轨迹的分布的非统一扩展战略。拟议方法有效地了解特定状态的描述,并显示算法绩效的改进。