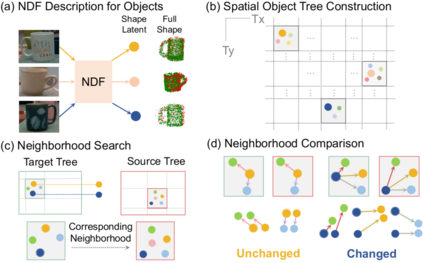
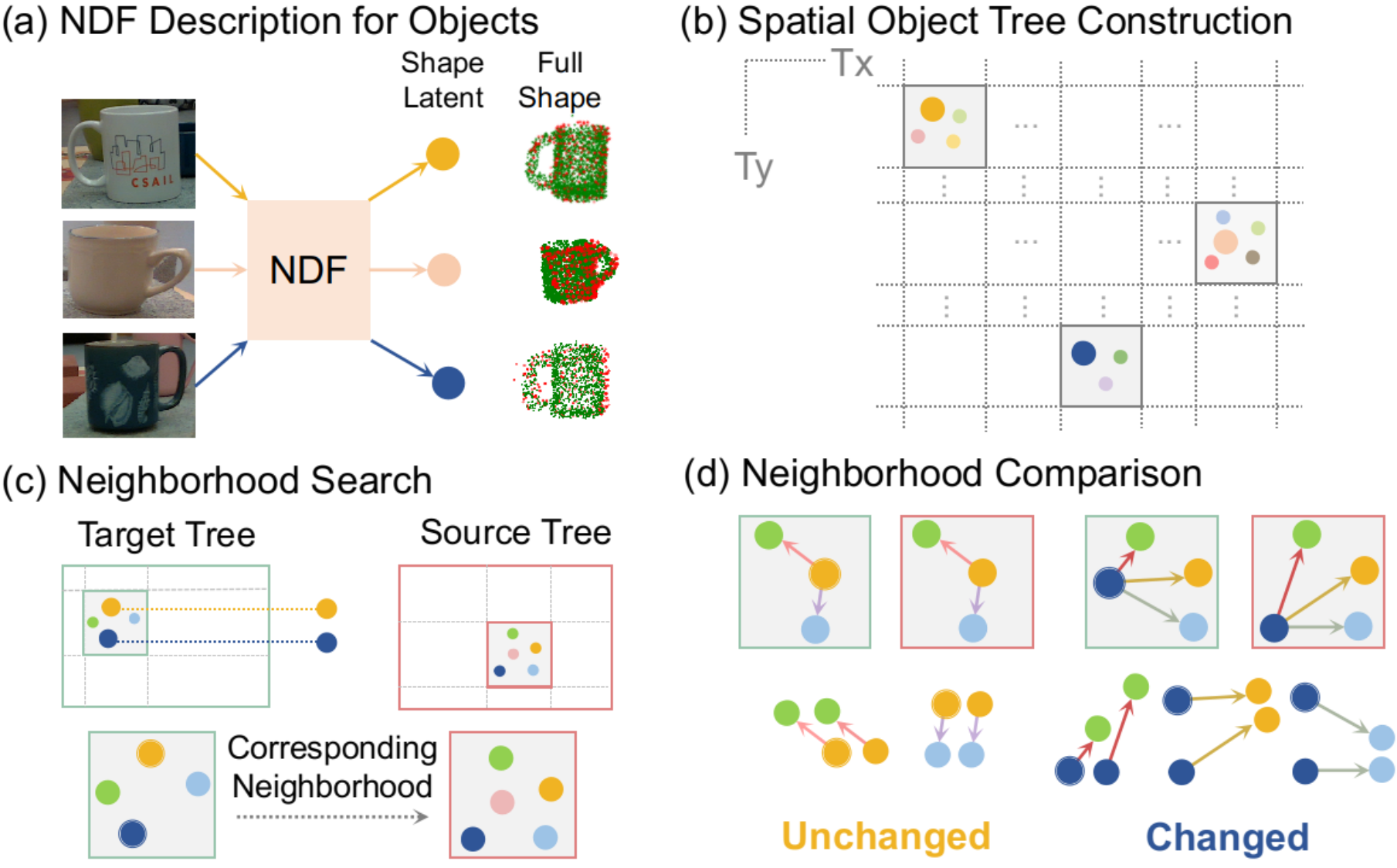
The ability to reason about changes in the environment is crucial for robots operating over extended periods of time. Agents are expected to capture changes during operation so that actions can be followed to ensure a smooth progression of the working session. However, varying viewing angles and accumulated localization errors make it easy for robots to falsely detect changes in the surrounding world due to low observation overlap and drifted object associations. In this paper, based on the recently proposed category-level Neural Descriptor Fields (NDFs), we develop an object-level online change detection approach that is robust to partially overlapping observations and noisy localization results. Utilizing the shape completion capability and SE(3)-equivariance of NDFs, we represent objects with compact shape codes encoding full object shapes from partial observations. The objects are then organized in a spatial tree structure based on object centers recovered from NDFs for fast queries of object neighborhoods. By associating objects via shape code similarity and comparing local object-neighbor spatial layout, our proposed approach demonstrates robustness to low observation overlap and localization noises. We conduct experiments on both synthetic and real-world sequences and achieve improved change detection results compared to multiple baseline methods. Project webpage: https://yilundu.github.io/ndf_change
翻译:对长期运行的机器人而言,对环境变化进行解释的能力至关重要。预计代理人将捕捉操作过程中的变化,从而可以跟踪操作过程中的变化,以确保工作会议的顺利进展。然而,不同视角和累积的本地化错误使得机器人很容易因观测重叠和漂流物体关联程度低而错误地探测周围世界的变化。在本文件中,根据最近提出的类别级神经描述字段(NDFs),我们开发了一个目标级在线变化探测方法,该方法对于部分重叠的观测和噪音本地化结果十分有力。我们利用了非DFs的形状完成能力和SE(3)-QQQQ(S),我们代表了带有压缩形状代码的物体,将部分观测中的全部对象形状编码编码化。这些物体随后根据从NDFs回收的用于快速查询对象邻居的物体中心,组织成一个空间树形结构。通过形状代码相近和比较本地对象邻空间布局,我们拟议的方法显示对观测重叠和本地化噪音的强度。我们在合成和现实世界范围内进行实验,SEDVDR/DVDVS 改进了基准测算结果。