【泡泡图灵智库】数据高效利用的分布式视觉SLAM(ICRA)
泡泡图灵智库,带你精读机器人顶级会议文章
标题:Data-Efficient Decentralized Visual SLAM
作者:Titus Cieslewski, Siddharth Choudhary and Davide Scaramuzza
来源:ICRA2018
编译:李永飞
审核:颜青松
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——数据高效利用的分布式视觉SLAM,该文章发表于ICRA2018。
分布式视觉SLAM在绝对定位位置的场景下的多机器人应用中是一种强大的工具。作为视觉导航,它使用廉价、轻量多功能的相机;由于是分布式的,其不依赖于与通信中心。本文中,我们整合了最新的分布式SLAM各个部分,形成了新的完整了分布式视觉SLAM系统。为了数据关联和优化,已有的分布式视觉SLAM系统在所有的机器人间交换全部的数据,这导致数据传输的复杂度平方于为机器人数量。相反,本文的数据关联更加有效,分为两个阶段:首先,一个高度浓缩的对整个图像的描述子被送到某一确定的机器人。而后,仅当第一阶段成功,估计相对位置所需的数据才会被发送到某一确定的机器人。因此,数据传输的复杂度正比于机器人的数目,并采用了高度概括的地点表达。优化方面,本文采用了一种分布式的图优化算法。其仅需交换最小量的数据,该数据量正比于轨迹的重叠部分。本文分析了结果,并指出了系统元素的瓶颈。本文使用公共数据集对算法进行了评估,并开源了算法的代码。
主要贡献
本文主要实现了一个完整的分布式视觉SLAM系统,其重要贡献为:
1、提出了一套完整的分布式视觉SLAM系统;
2、在公共数据集上验证了算法的有效性,并开源了代码。
算法流程
本文中,作者重点解决了分布式SLAM中数据传输量大的问题,通过在数据关联,相对姿态估计,后端优化等环节设计一系列算法,从而保持数据传输量尽可能少。图1展示了整个系统的各模块,以及各模块间的数据交互。下面将对各个环节进行一个具体的介绍:
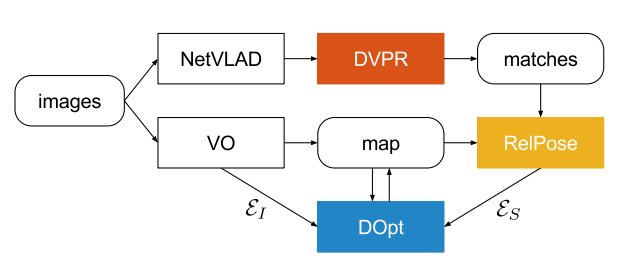
图1. 系统中的组件和其间的交互。该图显示了在每个机器人上运行的组件。彩色的模块表示和其他机器人有通信的模块。尖角块表示软件模块,圆角块表示数据。DVPR:分布式视觉地点识别,VO:视觉里程计,RelPose:几何验证和相对位姿估计,DOpt:分布式优化。
1、单个机器人测量
单个机器人测量是指单个机器人独立地通过其观测的图像估计得到的机器人的状态:

其由单个机器人上的视觉里程计来实现,在本文中,使用了ORB-SLAM.
2、机器人间测量
机器人间的测量,是指联合两个机器人对同一场景的观测,估计两个机器人间的相对位姿。为了较少数据的传输,本文采用了一种两阶段的算法:首先,通过分布式地点识别,判断不同机器人是否对同一地点进行了观测;如果验证通过,再传输必要的数据,估计其间的相对位姿,具体算法分别见第三和第四部分。
3、分布式视觉地点识别
分布式地点识别,就是在其他机器人观测的图像中,匹配到当前机器人的观测图像。本文采用了NetVLAD,将整张图像描述一个描述子。如果两幅图满足如下条件,则认为可能是同一地点的观测结果:

4、相对位姿估计
当检测到不同机器人对同一场景进行了观测,就能够计算获取这一观测时,不同机器人的相对位姿。这一过程类似于检测到闭环后的姿态估计。但是为了减少数据的传输,本文仅将关键点位置、关键点特征ID(视觉词)传输给另一机器人,即:

关键点特征ID能够提供特征点的初始匹配,而后使用RANSCA估计相对位姿。如果有足够多的内点,则认为是对同一场景的观测。最后,所有的内点对应被用作进一步优化相对位姿估计:

为进一步较少相对位姿估计带来的数据通信量,本文进一步制定如下规则:只有邻近的帧没有建立相对位姿关系,才发送数据以建立新的相对位姿关系。
5、分布式姿态优化
由于各个相对姿态测量存在误差,姿态优化可转换为以下问题:
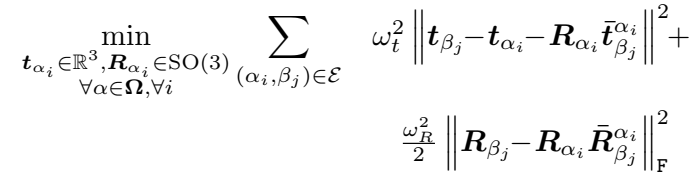
为实现上述问题的分布式解法,采用了一种分两步的解法:首先,求解上述问题的放宽约束的版本,得到旋转矩阵;而后,采用高斯牛顿迭代,求取全姿态。
在上述两步中,都需要用到线性系统的求解,通过对线性系统的分离,可以得到各个子系统,从而确定不同机器人间需要传输的最小数据量。
主要结果
本文重要从数据传输量、系统精度、参数对算法的影响三个方面对整个算法系统进行了评估。其中,数据传输量对各个模块的数据传输进行了统计,以便更好地了解系统各个模块的传输数据量;系统精度采用平均轨迹误差(ATE)作为估计指标;参数对算法的影响中,重点测试了τmdg这一参数对算法的影响。实验结果如下:
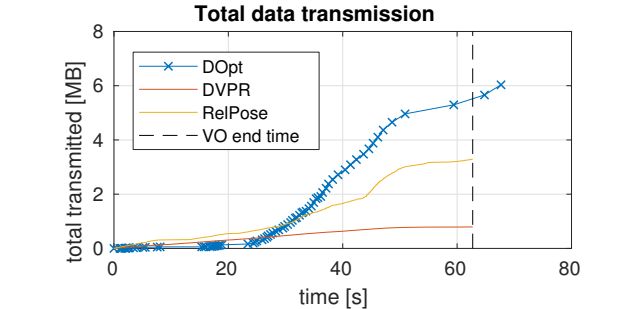
图2. 三个系统组件(分布式优化(DOpt),分布式地点识别(DVPR),相对位姿估计(RelPose))数据传输量随时间的变化。分布式优化在视觉里程计启动后将持续运行,直至视觉里程计生成的所有数据都被融合。
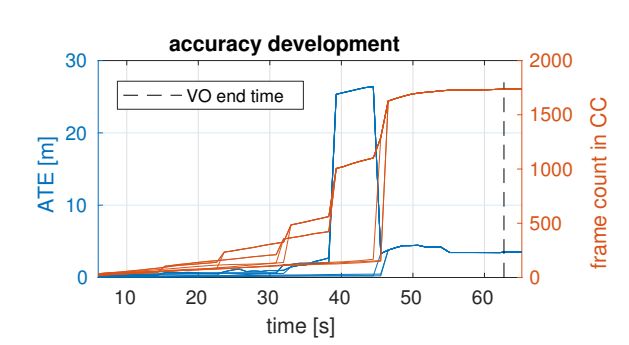
图3. 平均轨迹误差。注意,在视觉里程计结束后,优化的精度并没有很大的变化,这说明在所有数据被用于优化之前,状态估计已经达到了最终的精度。
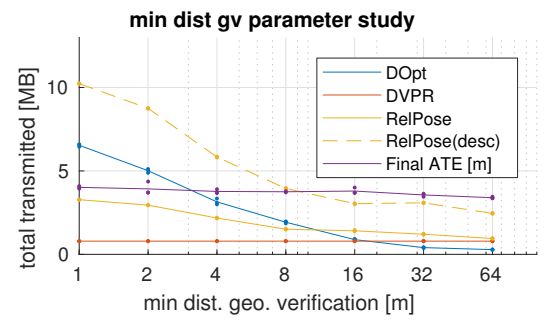
图4. 参数τmdg变化的影响,该参数控制着在已经建立了相对位姿关系的帧αi和下一帧机器人α发送到机器人β用于几何验证的两帧间的距离。可以看出,可以被用作显著地减少通信带宽。同时这对平均轨迹误差没有很明显的影响。虚线表示的是在相对位姿估计环节传输关键点的描述子而不是关键点的索引时的数据传输量。

Abstract
Decentralized visual simultaneous localization and mapping (SLAM) is a powerful tool for multi-robot applications in environments where absolute positioning is not available. Being visual, it relies on cheap, lightweight and versatile cameras, and, being decentralized, it does not rely on communication to a central entity. In this work, we integrate state-of-the-art decentralized SLAM components into a new, complete decentralized visual SLAM system. To allow for data association and optimization, existing decentralized visual SLAM systems exchange the full map data among all robots, incurring large data transfers at a complexity that scales quadratically with the robot count. In contrast, our method performs efficient data association in two stages: first, a compact full-image descriptor is deterministically sent to only one robot. Then, only if the first stage succeeded, the data required for relative pose estimation is sent, again to only one robot. Thus, data association scales linearly with the robot count and uses highly compact place representations. For optimization, a state-of-the-art decentralized pose-graph optimization method is used. It exchanges a minimum amount of data which is linear with trajectory overlap. We characterize the resulting system and identify bottlenecks in its components. The system is evaluated on publicly available datasets and we provide open access to the code.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



