【泡泡图灵智库】利用非线性因子恢复进行视觉惯性建图(CVPR)
泡泡图灵智库,带你精读机器人顶级会议文章
标题:Visual-Inertial Mapping with Non-Linear Factor Recovery
作者:Vladyslav Usenko1 Nikolaus Demmel1 David Schubert1
来源:CVPR 2019
编译:李阳阳
审核:凌勇
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是—— Visual-Inertial Mapping with Non-Linear Factor Recovery ,该文章发表于CVPR 2019。
相机和惯性测量单元对于运动估计和环境建图是互补的。它们的结合使视觉惯性里程计更加准确和鲁棒。但是,对于全局连续性建图,结合图像和IMU信息并不是直观的。利用一系列图像作为基准去估计运动是必需的。大多数系统利用时间间隔较长的关键帧去处理地图,但关键帧仅仅包含较少的有用信息。本文提出利用非线性因子恢复提取相关信息去进行视觉惯性建图。作者重建了一组非线性因子确保VIO的轨迹信息。为了获取全局一致性地图,利用BA将因子和回环结合起来。本文VIO系统使地图的翻滚角和俯仰角可观,提高了建图的鲁棒性和准确性。在公共数据集试验中证明本文方法优于目前主流的方法。
主要贡献
1,本文提出一个通过非线性因子恢复,基于关键点BA调整和短期视觉跟踪相结合的视觉惯性里程计。
2,本文从VIO边缘化后的先验信息中提取视觉惯性信息,不仅使其位更小的优化问题和在重力校准地图中,姿态估计更好。
算法流程
1. 视觉惯性里程计
光流跟踪二维中的一组稀疏点。进行BA确保每个帧都将由点重投影误差和IMU预积分误差最小化。保持优化问题的参数,边缘化旧的状态。本文定义像素块追踪如图1追踪效果。
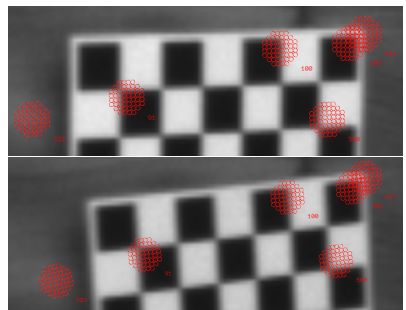
图 1 像素块追踪
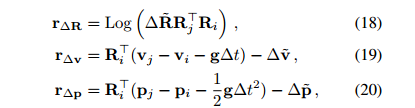
每一像素块的残差项定义如下:

像素块残差整合后的重投影误差为:

IMU残差项定义为:
2,视觉惯性建图
本文利用非线性因子从前端里程计中恢复关键帧的位置信息参与到BA优化框架中,BA优化关键帧的位姿和关键点的位置,用关键点检测回环和增加重投影优化去实现全局一致建图。如图2。
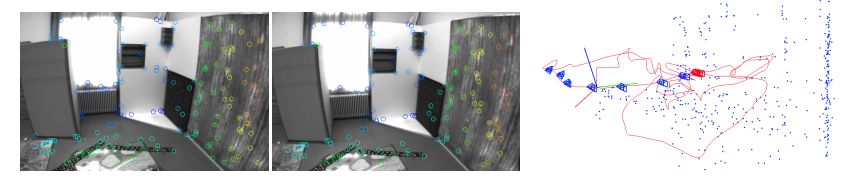
图 2 视觉惯性建图
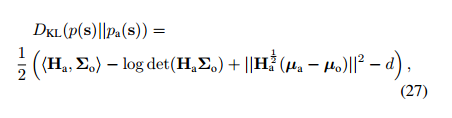
非线性因子恢复近似于线性马尔科夫稀疏因子图中的因子,我们利用NFR在恢复和初始化分布中最小华KLD,即:
主要结果
用于在理想条件下测试系统一个模拟环境,由在半径为10米的球体上采样的n个随机关键点和一个平滑的B样条曲线,描述了IMU随时间变化,如图3。
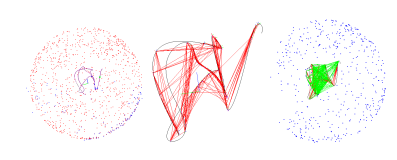
图 3 B-样条曲线模拟
从样条曲线中看出,生成地面真实姿态、速度、加速度,并人为地添加白噪声和偏差来模拟IMU测量。对于视觉部分,设计关键点在相机的图像平面中添加白噪声模拟光流估计结果。
EUROC数据集测试结果如图4:
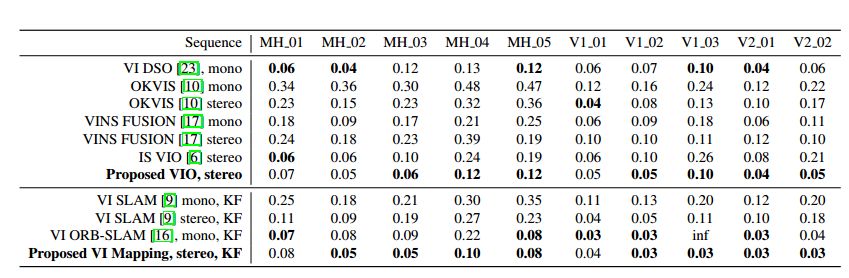
图 4 EUROC数据集测试结果

Abstract
Cameras and inertial measurement units are complementary sensors for ego-motion estimation and environment mapping. Their combination makes visual-inertial odometry (VIO) systems more accurate and robust. For globally consistent mapping, however, combining visual and inertial information is not straightforward. To estimate the motion and geometry with a set of images large baselines are required. Because of that, most systems operate on keyframes that have large time intervals between each other. Inertial data on the other hand quickly degrades with the duration of the intervals and after several seconds of integration, it typically contains only little useful information. In this paper, we propose to extract relevant information for visual-inertial mapping from visual-inertial odometry using non-linear factor recovery. We reconstruct a set of non-linear factors that make an optimal approximation of the information on the trajectory accumulated by VIO. To obtain a globally consistent map we combine these factors with loop-closing constraints using bundle adjustment. The VIO factors make the roll and pitch angles of the global map observable, and improve the robustness and the accuracy of the mapping. In experiments on a public benchmark, we demonstrate superior performance of our method over the state-of-the-art approaches
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



