【泡泡图灵智库】基于数据关联的动态Object-Level SLAM(arXiv)
泡泡图灵智库,带你精读机器人顶级会议文章
标题:EM-Fusion: Dynamic Object-Level SLAM with Probabilistic Data Association
作者:Michael Strecke and Jorg el.
来源:arxiv
编译:万应才
审核:李雨昊
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——EM-Fusion: Dynamic Object-Level SLAM with Probabilistic Data Association ,该文章发表于arxiv 2019。
使用RGB-D相机获取密集三维环境地图的大多数方法都假定静态环境或将移动对象作为异常值。然而,运动物体的表示和跟踪对于机器人或增强现实的应用具有重要的潜力。本文提出了一种新的具有密集物体级表示的动态SLAM方法。本文在局部空间用符号距离函数(SDF)图中表示刚性物体,并用SDF表示将多目标跟踪表示为RGB-D图像的直接对准。本文的主要创新点是概率公式,它直接进行数据关联和遮挡处理策略。本文在实验中分析了本文的方法,并证明了本文的方法在鲁棒性和准确性方面与最先进的方法相比具有优势。
主要贡献
1.本文提出了一种动态物体SLAM的概率EM公式,它直接进行数据关联和遮挡处理策略。
2.在本文的EM公式的基础上,本文将多目标跟踪作为RGB-D图像的SDF目标表示的直接对准方法,并对这种跟踪方法在稠密动态SLAM中的应用进行了评价。
3.本文的方法在几个动态物体SLAM数据集上实现了最先进的性能.
算法总结
1.整体结构
在本文中,本文提出了一种新的动态object-level SLAM方法,即对场景中的物体进行建图和跟踪。本文通过图像的实例分割来检测对象,然后执行跟踪和建立静态背景和目标的地图。本文在概率期望最大化公式中确定像素与对象的未知关联,该公式根据本文地图表示中测量的可能性估计软关联可能性。概率关联提供了额外的几何线索,并隐式地处理对象分割、跟踪和建图的遮挡问题。
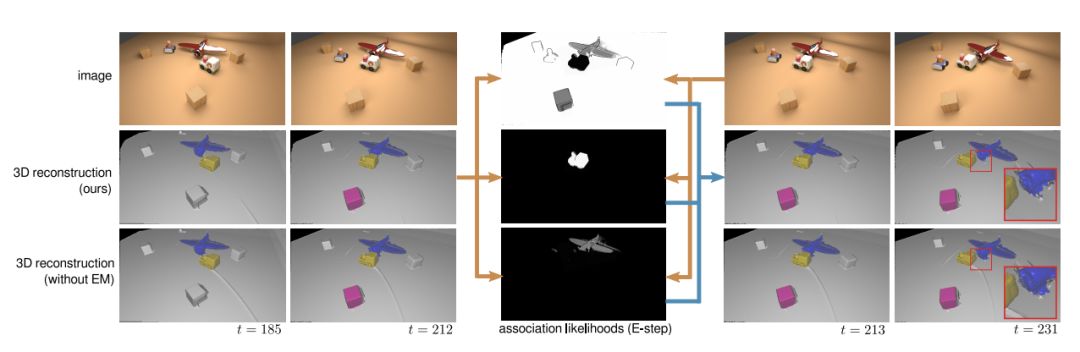
图1 动态对象级与概率数据关联
图1在期望最大化框架中,我们推断像素与对象的关联可能性。概率数据关联提高了跟踪和映射的准确性和鲁棒性。它隐式地处理遮挡。e-step根据当前图像的数据可能性(给定最新的对象地图和姿势)估计关联的可能性。在M-step姿势和地图中,根据关联相似性用测量值更新。背景(顶部)、火车(中部)和飞机(底部)的关联相似性是可视化的。移动的火车挡住了桌子和飞机,而这些被协会很好地修复了。由于没有关联的相似性,由于错误的数据关联,工件被集成到地图中。
2.像素与三维物体关联
用空间有符号距离函数(SDF)来表示物体图。本文从深度上增加了SDF的最大似然积分,以合并它们的关联似然。概率数据关联有助于深度图与SDF对象图的直接对齐。这样可以避免投影数据通过光线投射进行关联,而光线投射是ICP算法所必需的。在本文的实验中,本文在几个数据集上评估了本文的方法,并证明了其优于最先进的方法。本文的结果表明,适当的数据关联概率处理是动态场景中鲁棒对象级冲击的关键因素。
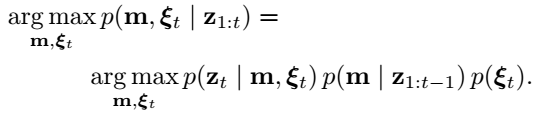
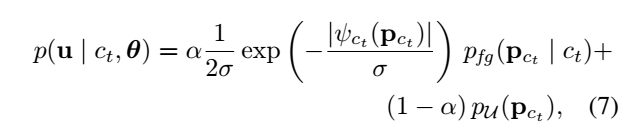
3.概率模型

主要结果
1.动态目标跟踪
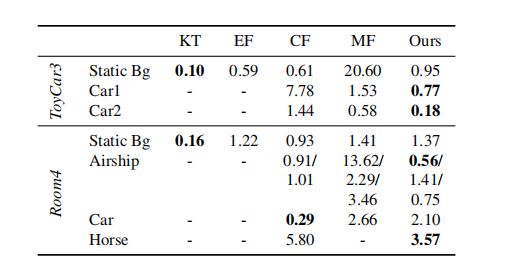
表1 合成序列Co-Fusion 上AT-RMSEs 轨迹(cm)估计
2.静态背景鲁棒性跟踪
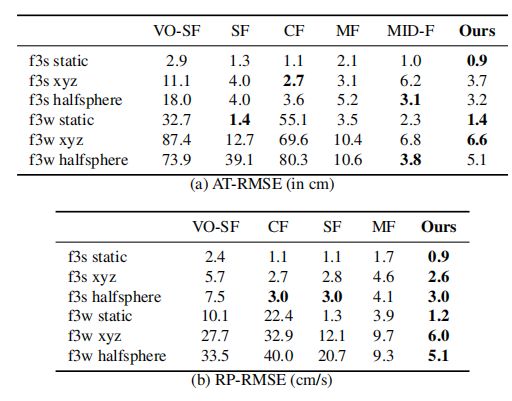
表2 不同方法和措施对动态场景中静态背景的鲁棒摄像机跟踪的比较。我们的方法提供了最先进的结果,在大多数序列和测量中优于以前的方法。
3.用Co-fusion发表的真实世界数据集的定性评价
本文证明,我们可以处理快速移动(第一个数据集的第二和第三个图像相距仅25帧),以及具有相对较弱几何提示的对象,例如第二个数据集中的时钟。注意,在最后一个数据集中没有检测到移交Teddy的左臂。当它最初被集成到背景中时,它很快就会被实际的背景深度覆盖,在它离开视图后不久。
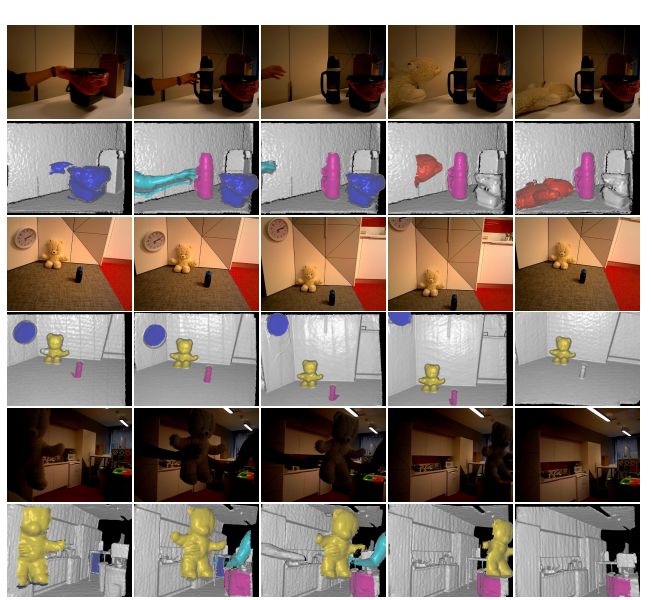
图2 Co-Fusion发布的真实数据集的定性评估
4.增量Mask结合
图3自上而下:MaskRGB帧,Mask集成前的Teddy模型输出和关联可能性,Mask集成后的模型输出和关联可能性。可以看到,关联相似性为Teddy对象体积内的移动几何体提供了一个软几何分割。一旦蒙版R-CNN确认这些像素属于该对象,它就会变得更强。请注意,首先在第240帧中检测到泰迪熊,因此在该帧中还没有关联的可能性。
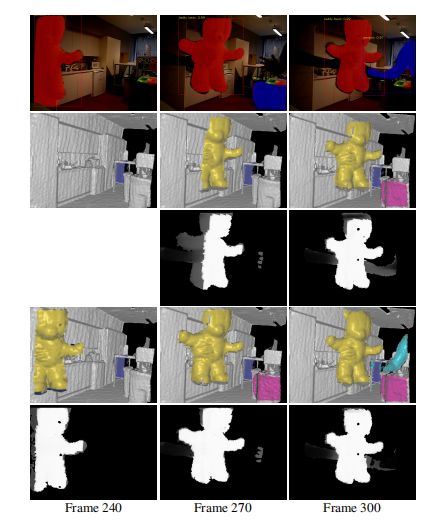
图3 增量Mask结合
被的外观会发生巨大的变化导致找不到匹配关系。

Abstract
The majority of approaches for acquiring dense 3D environment maps with RGB-D cameras assumes static environments or rejects moving objects as outliers. The representation and tracking of moving objects, however, has significant potential for applications in robotics or augmented reality. In this paper, we propose a novel approach to dynamic SLAM with dense object-level representations. We represent rigid objects in local volumetric signed distance function (SDF) maps, and formulate multi-object tracking as direct alignment of RGB-D images with the SDF representations. Our main novelty is a probabilistic formulation which naturally leads to strategies for data association and occlusion handling. We analyze our approach in experiments and demonstrate that our approach compares favorably with the state-of-the-art methods in terms of robustness and accuracy.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


