【泡泡读者来稿】VINS 论文推导及代码解析(二)
崔华坤,SLAM算法工程师,主要研究方向是VIO。2011年硕士毕业于北京工业大学,毕业后从事六年的三维显示研发,从最初的裸眼3D显示到现在的AR显示,期间做出一款国内尺寸最大的裸眼3D LED屏。对作者感兴趣的可以加微信:cuihuakun。
后端非线性优化
状态向量
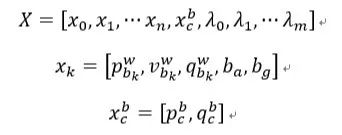
状态向量共包括滑动窗口内的n+1个所有相机的状态(包括位置、朝向、速度、加速度计bias和陀螺仪bias)、Camera到IMU的外参、m+1个3D点的逆深度:
目标函数

其中三个残差项即误差项分别为边缘化的先验信息、IMU测量残差、视觉的重投影残差。三种残差都是用马氏距离表示。
根据《十四讲》中高斯-牛顿法,若要计算目标函数的最小值,可以理解为,当优化变量有一个增量后,目标函数值最小,以IMU残差为例,可写成如下所示:

其中 J_{b_{k+1}}^b_k 为误差项关于所有状态向量(即优化变量)X的Jacobian,将上式展开并令关于的导数为0,可得增量的计算公式:

那么,对于公式(19)的整体目标函数的整体增量方程可写成:
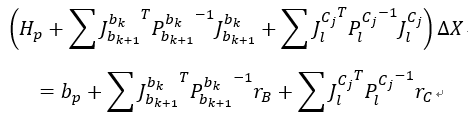
上式中,P_{b_{k+1}}^{b_k}为IMU预积分噪声项的协方差,P_l^{C_j}为visual观测的噪声协方差。当IMU的噪声协方差P_{b_{k+1}}^{b_k}越大时,其信息矩阵{P_{b_{k+1}}^{b_k}}^-1将越小,意味着该IMU观测越不可信,换句话说,因IMU噪声较大,越不可信IMU预积分数据,而更加相信visual观测。注意,这里的IMU和visual协方差的绝对值没有意义,因为考虑得是两者的相对性。
可将上式继续简化为:

其中Λ_p,Λ_B,Λ_C和为Hessian矩阵,上述方程称之为增量方程。
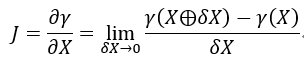
值得说明的是,上面中的Jacobian虽然是误差项r关于状态向量X的一阶导,但在具体求解时,通常采用扰动的方式进行计算,如下所示,注意其中δX的是状态向量的微小扰动,并非上面求解的增量∆X:
IMU约束
1)残差:两帧之间的PVQ和bias的变化量的差
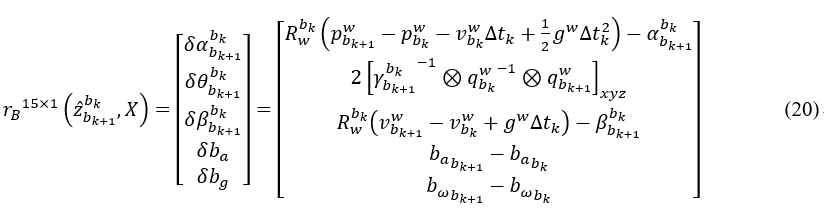
其中各增量关于bias的Jacobian可从公式(16)的大Jacobian中的相应位置获得。上面与代码中IntegrationBase::evaluate()对应。
2)优化变量:

3)Jacobian:
计算Jacobian时,残差对应的求偏导对象为上面的优化变量,但是计算时采用扰动方式计算,即扰动为

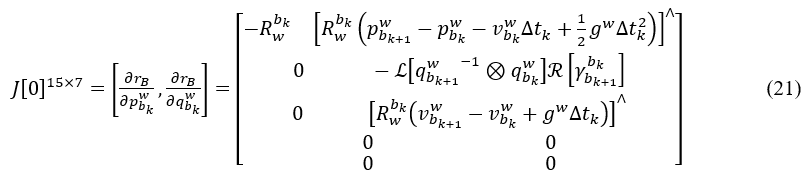
推导可参考附录10.4。
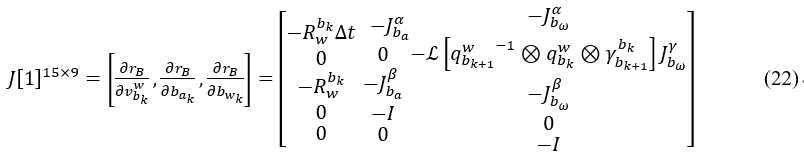
推导可参考附录10.5。
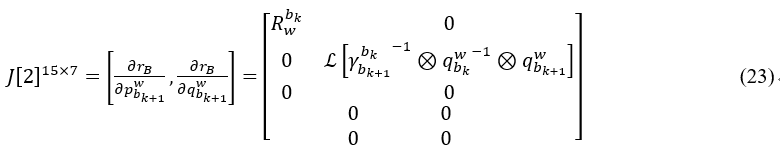
推导可参考附录10.6

上面公式在代码中对应:
class IMUFactor : public ceres::SizedCostFunction<15, 7, 9, 7, 9> 对于Evaluate输入double const *const *parameters, parameters[0], parameters[1], parameters[2], parameters[3]分别对应4个输入参数, 它们的长度依次是7,9,7,9,分别对应4个优化变量的参数块。
代码IMUFactor::Evaluate()中residual还乘以一个信息矩阵sqrt_info,这是因为真正的优化项其实是Mahalanobis 距离:d=r^TP^{-1}r,P是协方差,又因为Ceres只接受最小二乘优化,也就是, 所以把P^{-1}做LLT分解,即LL^{T}=P^{-1},则有:

令r'=L^Tr作为新的优化误差,这样就能用Ceres求解了。Mahalanobis距离其实相当于一个残差加权,协方差大的加权小, 协方差小的加权大, 着重优化那些比较确定的残差. 若写成“sqrt_info.setIdentity()”相当于不加权。
4)协方差
上面提到的IMU协方差P为公式(17)推导的IMU预积分中迭代出来的IMU增量误差的协方差。
视觉约束
1) 残差
视觉残差是重投影误差,对于第l个路标点P,将P从第一次观看到它的第i个相机坐标系,转换到当前的第j个相机坐标系下的像素坐标,可定义视觉误差项为:

其中,P ̅_l^(c_j )为第l个路标点在第j个相机归一化相机坐标系中的观察到的坐标:

另外,P_l^(c_j )是估计第l个路标点在第j个相机归一化相机坐标系中的可能坐标,推导可参附录10.7:

因为视觉残差的自由度为2,因此将视觉残差投影到正切平面上,b1,b2为正切平面上的任意两个正交基。
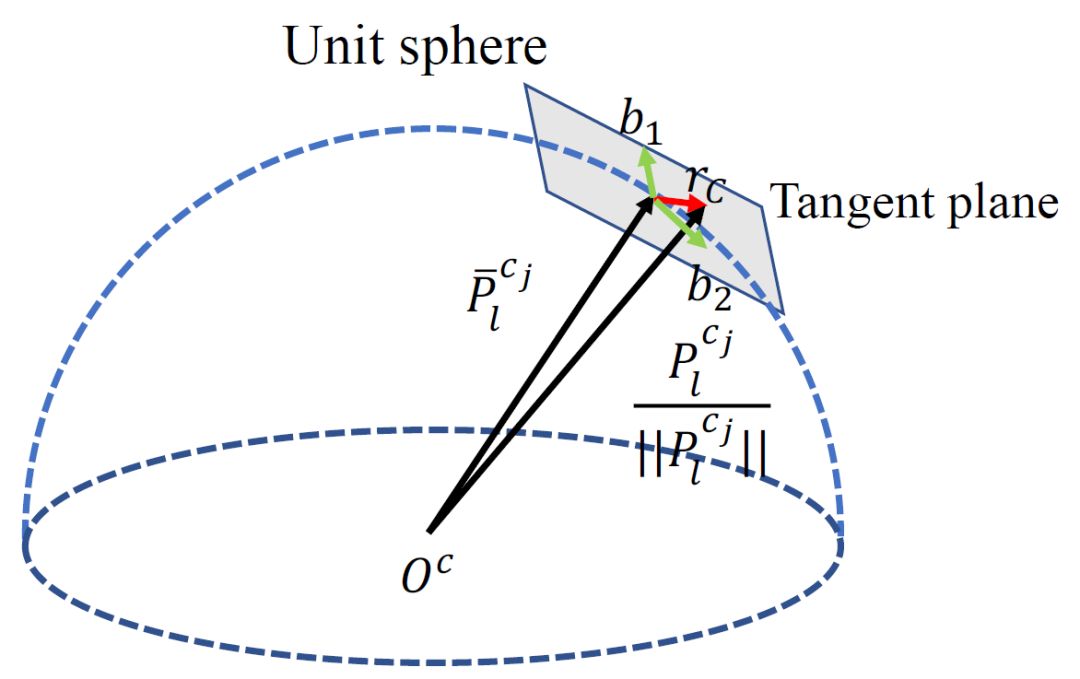
图4 在单位球面上的视觉残差
2) 优化变量

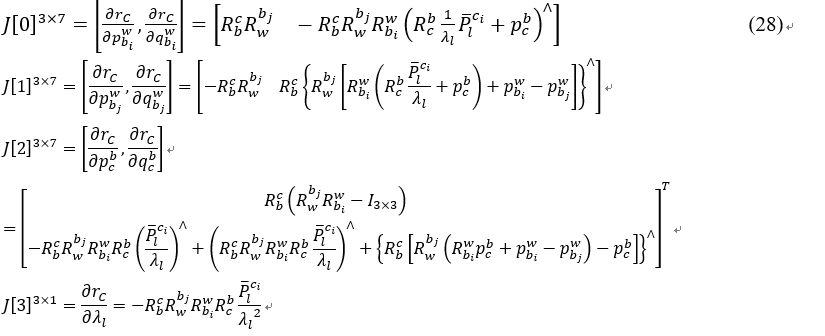
3) Jacobian
根据视觉残差公式,我们可以得到相对于各优化变量的Jacobian,推导可参考附录10.7:
4)协方差
视觉约束的噪声协方差与标定相机内参时的重投影误差,也就是偏离几个像素有关,代码对应为ProjectionTdFactor::sqrt_info,这里取的1.5个像素,对应到归一化相机平面上的协方差矩阵需除以焦距f,则信息矩阵等于协方差矩阵的逆,为:

5)如果考虑Cam和IMU的时间戳偏移量td,则需要增加优化变量,后续再补。
前端视觉处理
特征点检测
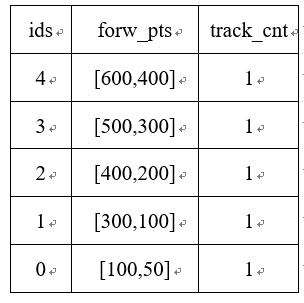
Frame 1: goodFeaturesToTrack检测MAX_CNT个特征点,设置forw_pts如下:
表1 第一帧的特征点
特征点跟踪
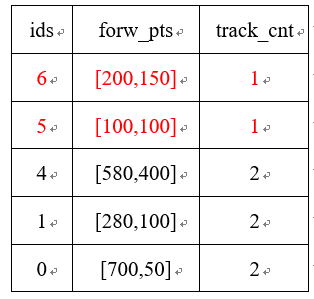
Frame 2: calcOpticalFlowPyrLK跟踪,将跟踪失败的点删除,跟踪成功的点点跟踪计数+1,并调用goodFeaturesToTrack检测出MAX_CNT - forw_pts.size()个特征点,并添加到forw_pts中,并调用updateID更新ids,最后得到的forw_pts如下:
表2 第二帧的特征点
代码FeatureTracker::undistortedPoints()中cur_un_pts为归一化相机坐标系下的坐标,pts_velocity为当前帧相对前一帧特征点沿x,y方向的像素移动速度。
初始化
初始化采用视觉和IMU的松耦合方案,首先用SFM求解滑窗内所有帧的位姿,和所有路标点的3D位置,然后跟IMU预积分的值对齐,求解重力方向、尺度因子、陀螺仪bias及每一帧对应的速度。初始化的流程图如下所示:
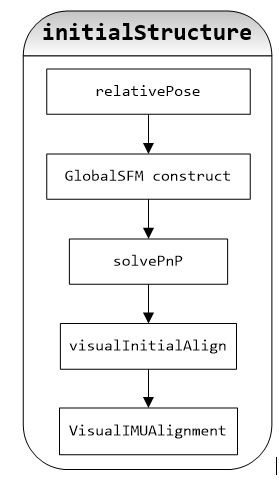
图5 初始化流程图
首先,我们对代码中几个易混变量进行说明:
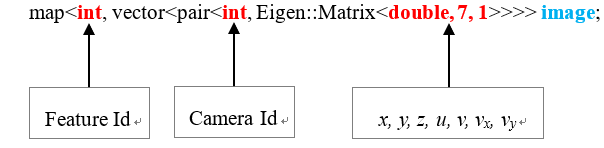
1) 传到processImage的image表示当前帧跟踪到上一帧中的特征点集合,也就是当前帧观测到的所有的路标点(不包括在当前帧新提取的点),如表2中track_cnt≥2的feature,image类型为:
2) FeatureManager中几个变量:
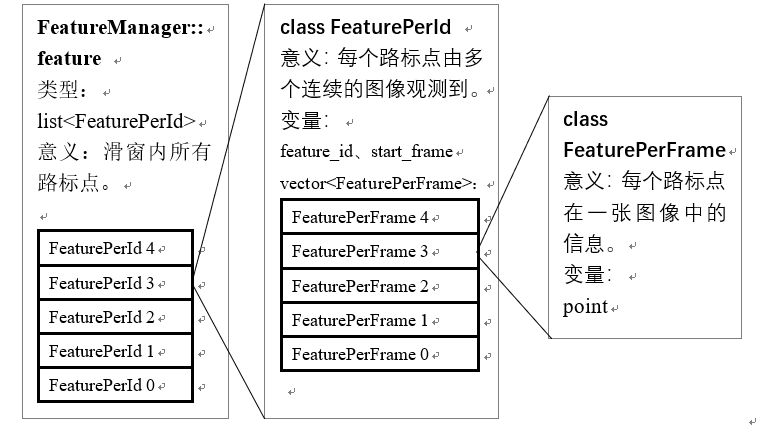
图6 FeatureManager中的几个易混变量
relativePose
在滑窗内寻找与当前帧的匹配特征点数较多的关键帧作为参考帧,并通过求基础矩阵cv::findFundamentalMat计算出当前帧到参考帧的T;
GlobalSFM.construct
首先,将图4中feature队列,放到vector<SFMFeature> sfm_f中,其中SFMFeature中的observation 存放的是观测到该路标点的FrameId及特征点坐标,如下所示:
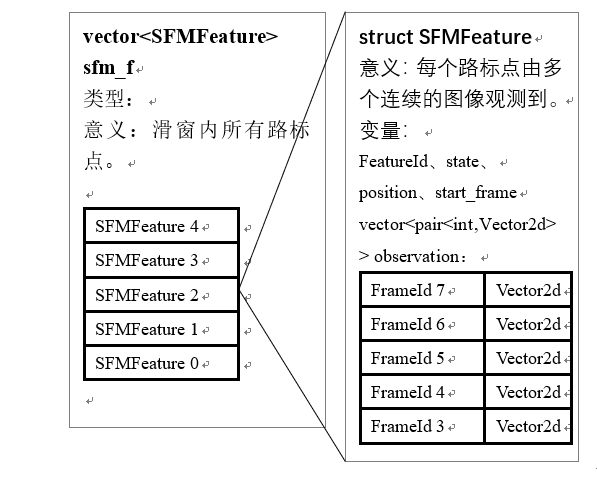
图7 SFM中的几个易混变量
GlobalSFM的流程如下,其中,参考帧为上一步选出来的最共视帧,最后得到的sfm_tracked_points为三角化出来的3D路标点。
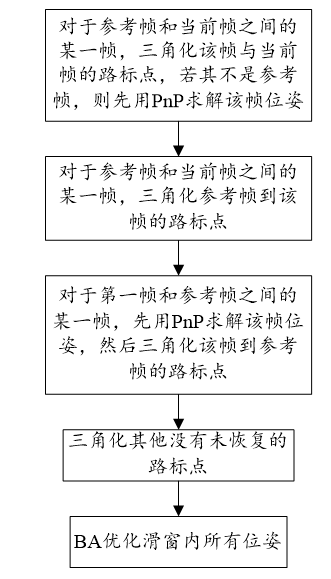
图8 SFM流程图
solvePnP
对滑窗内每一帧图像,都跟上一步SFM得到的所有3D路标点,进行cv::solvePnP求解位姿。
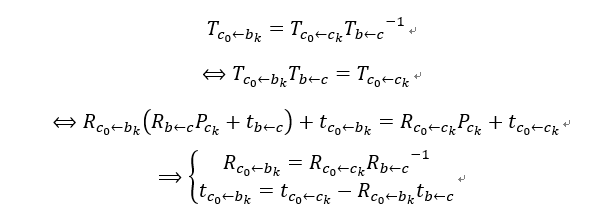
纯视觉初始化时,我们采用第一帧c0作为基准坐标系,若要转化为从body坐标系到c0坐标系,可以进行如下变换:
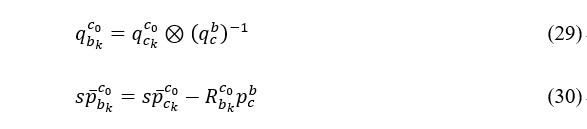
上式推导如下,这里采用个人较熟悉的写法:
visualInitialAlign
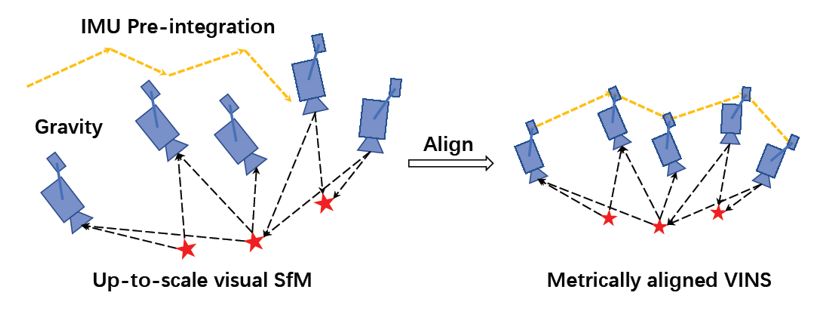
图9 IMU预积分与视觉结构对齐
1) 陀螺仪bias校正:对应代码中solveGyroscopeBias()函数
目标函数为:visual给出的相邻帧间的旋转应等于IMU预积分的旋转值
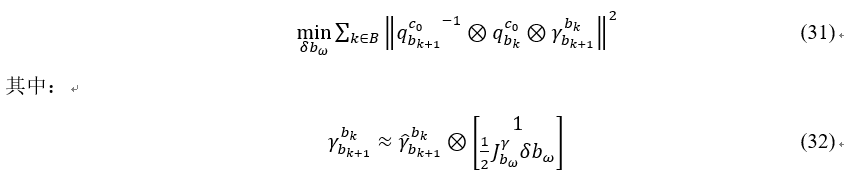
上述目标函数的最小值为单位四元数,所以可以将目标函数进一步写为:
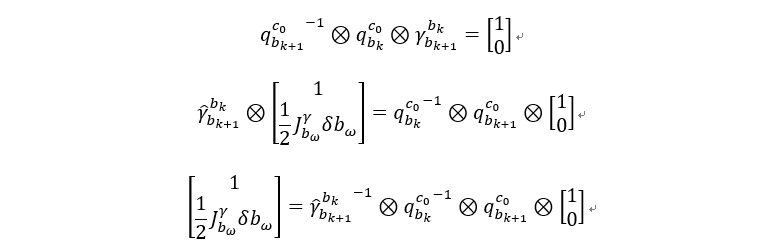
我们只考虑虚部,则有:

将左边转为正定阵,这样就可以直接用Cholesky进行分解了:

求解出陀螺仪的bias后,需要对IMU预积分值进行重新计算。
2)初始化速度、重力和尺度因子:对应代码中LinearAlignment ()函数
优化变量为:

其中,为在第0帧Camera相机坐标系下的重力向量。
残差可定义为相邻两帧之间IMU预积分出的增量α_(b_(k+1))^(b_k ),β_(b_(k+1))^(b_k ),与预测值之间的误差,可写成:

将公式(30)代入上式中的δα_(b_(k+1))^(b_k )可得:

我们想办法将上式转为Hx=b的形式,这样便于直接利用Cholesky进行求解:

转成矩阵形式可写成:

同样的也将转为矩阵形式,综合上式可写成:

即:
这样,可以用Cholosky分解下面方程求解X1:
3) 修正重力矢量:对应代码中RefineGravity()函数
因此重力矢量的模固定,因此将为2个自由度,可写成:
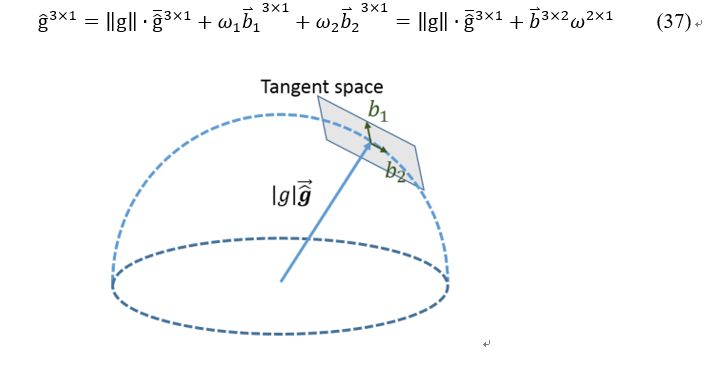
图10 两自由度的重力矢量参数化
将上式代入(36),重新整理可得:
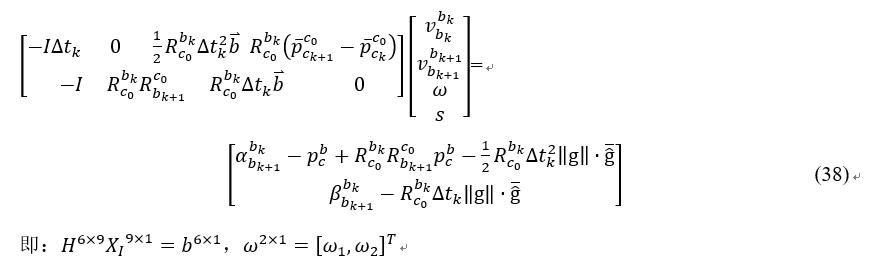
这样,可以用Cholosky分解下面方程求解X1:

这样我们就得到了在C0系下的重力向量g^{C_0},通过将旋转至惯性坐标系中的z轴方向,可以计算相机系到惯性系的旋转矩阵q_(C_0)^w,这样就可以将所有变量调整至惯性世界系中。
未完待续
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



