EKF常用于目标跟踪系统的扩展卡尔曼滤波器
卡尔曼滤波
卡尔曼滤波(Kalman filtering)一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。线性随机微分方程描述:
X(k)=A*X(k-1)+B*U(k)+W(k)
Z(k)=H*X(k)+V(k)
其中:
X(k)是k时刻的系统状态,
U(k)是k时刻对系统的控制量。
A和B是系统参数,对于多模型系统,A和B为矩阵。
Z(k)是k时刻的测量值。
H是测量系统的参数,对于多测量系统,H为矩阵。
W(k)和V(k)分别表示过程和测量的噪声。他们被假设成高斯白噪声(White Gaussian Noise),他们的协方差(covariance)分别是Q,R。
扩展卡尔曼滤波
卡尔曼最初提出的滤波理论只适用于线性系统,Bucy,Sunahara等人提出并研究了扩展卡尔曼滤波(Extended Kalman Filter,简称EKF),将卡尔曼滤波理论进一步应用到非线性领域。EKF的基本思想是将非线性系统线性化,然后进行卡尔曼滤波,因此EKF是一种次优滤波。其后,多种二阶广义卡尔曼滤波方法的提出及应用进一步提高了卡尔曼滤波对非线性系统的估计性能。二阶滤波方法考虑了Taylor级数展开的二次项,因此减少了由于线性化所引起的估计误差,但大大增加了运算量,因此在实际中反而没有一阶EKF应用广泛。
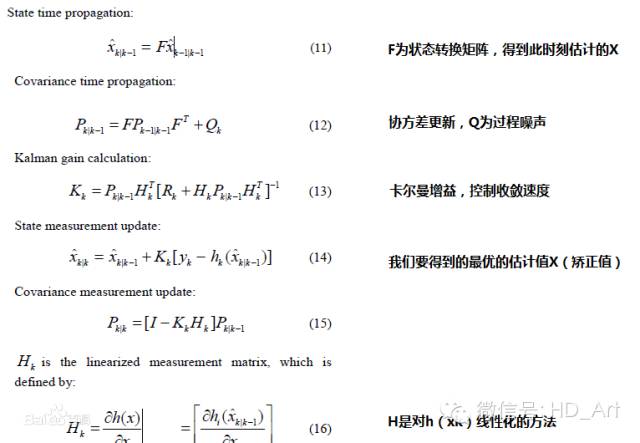
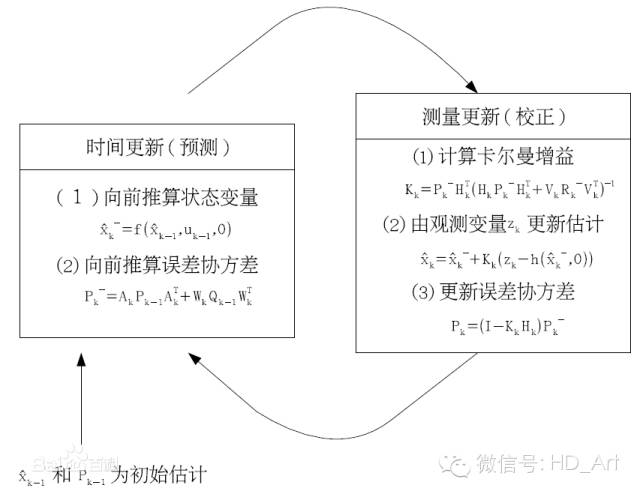
在状态方程或测量方程为非线性时,通常采用扩展卡尔曼滤波(EKF)。EKF对非线性函数的Taylor展开式进行一阶线性化截断,忽略其余高阶项,从而将非线性问题转化为线性,可以将卡尔曼线性滤波算法应用于非线性系统中。这样一来,解决了非线性问题。EKF虽然应用于非线性状态估计系统中已经得到了学术界认可并为人广泛使用,然而该种方法也带来了两个缺点,其一是当强非线性时EKF违背局部线性假设,Taylor展开式中被忽略的高阶项带来大的误差时,EKF算法可能会使滤波发散;另外,由于EKF在线性化处理时需要用雅克比(Jacobian)矩阵,其繁琐的计算过程导致该方法实现相对困难。所以,在满足线性系统、高斯白噪声、所有随机变量服从高斯(Gaussian)分布这3个假设条件时,EKF是最小方差准则下的次优滤波器,其性能依赖于局部非线性度。扩展卡尔曼滤波器是由卡尔曼滤波器考虑时间非线性的动态系统,常应用于目标跟踪系统。
EKF算法通过对观测量yk的更新,获得对状态向量Xk估计,他们满足如下关系
X(k+1)=f(Xk) + Wk;
y(k) =h(Xk) +Vk;
其中,X(k+1)为由前一时刻Xk的值估计出来的,f(Xk),h(Xk) 为非线性的,yk是可以获得的观测向量。

长按识别图中二维码关注我们!