【泡泡机器人原创专栏】IMU预积分总结与公式推导(三)
由于文中公式上下标较多,建议采用宽屏阅读。
本文为IMU预积分总结与公式推导系列技术报告的第三篇。
在前几篇发布后和大家的交流中,发现有的小伙伴对惯性导航很不了解。在本篇正文开始之前,我先简单阐述一下传统捷联惯性导航的基本思想。
惯性导航的核心原理基于牛顿第二定律,即位置的导数等于速度,速度的导数等于加速度。如果我们假设参考坐标系下载体的初始速度和初始位置已知,利用载体运动过程中参考系下的加速度信息,就可以不断地进行积分运算,更新实时的速度和位置。这基本上是中学的知识了,是不是很简单?
当然了,这是理想的理论情况,实际的情况是,加速度是由与载体固连的加速度计测量得到的(会跟随载体转动),每一时刻的加速度都是在当前的载体系下得到的,进行速度和位置的积分,前提是把这些加速度都统一到同一个坐标系下。更新姿态的作用就在于此——通过实时更新姿态,我们可以求得当前载体系相对于参考系的姿态,从而将载体系下的加速度测量投影到参考系下。
一个更麻烦的情况是,由于加速度计的测量原理,它敏感到的“加速度”实际上不是纯加速度,而是包含了反向重力加速度的比力。举两个例子帮助大家理解:假如一个三轴加速度计放在水平面上,那么它的输出将是铅垂线反向的9.8m/s^2;如果一个加速度计做自由落体运动,那么它的输出会是0。总而言之,加速度计无法敏感到重力(所以静止时才会有反向重力加速度输出)。因为这个麻烦的情况,捷联惯导中的姿态一般需要相对于水平地理系来表示(也就是说将水平地理系选作参考系),这样才好补偿重力加速度(因为我们都知道水平地理系下的正向重力加速度就是[0,0,-9.8],以东北天系为例)。
最后,传感器总是存在噪声的,惯性导航这种积分运算,必然使得IMU器件中的测量噪声不断的累积,从而造成定位和姿态误差。
好了,如果掌握了前面的内容,对于理解IMU预积分理论所需的惯导知识就已经足够了。至于捷联导航的更多复杂内容,比如对地球自转的处理,以及地速与绝对速度等概念就不做展开了,如果感兴趣可以去找本捷联惯导的书看看。
希望你看得不是很晕,休息一会,回到预积分中,下面进入正文吧@_@
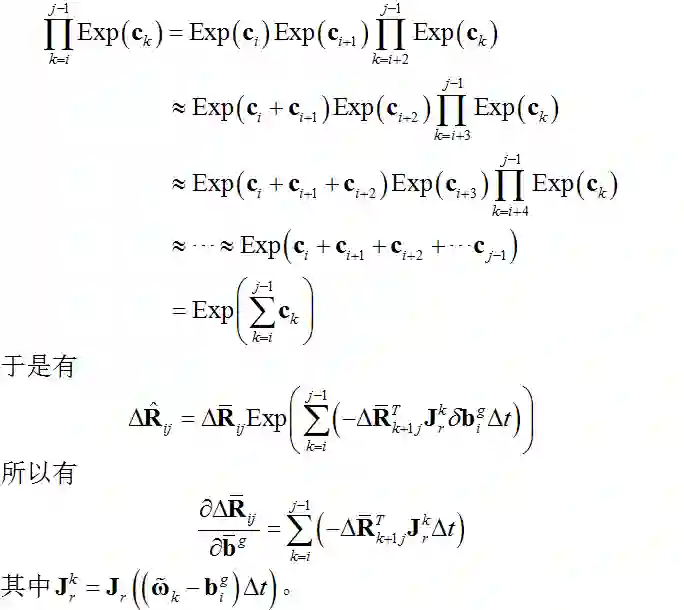
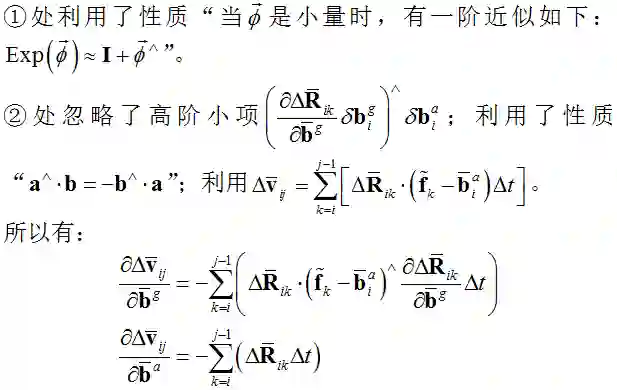
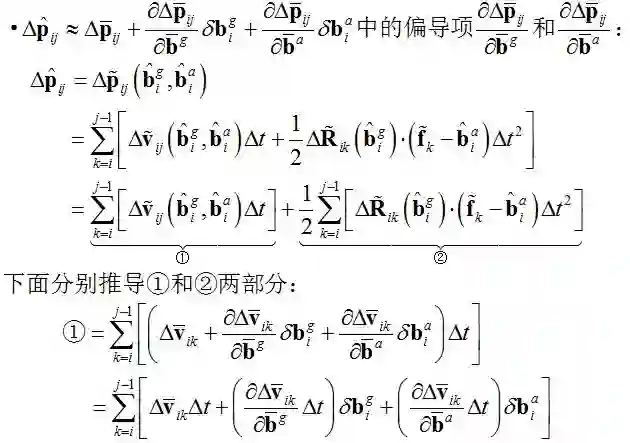
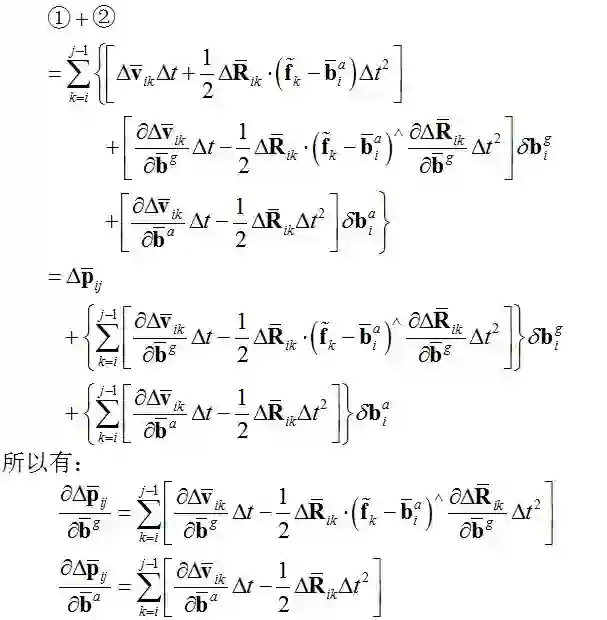
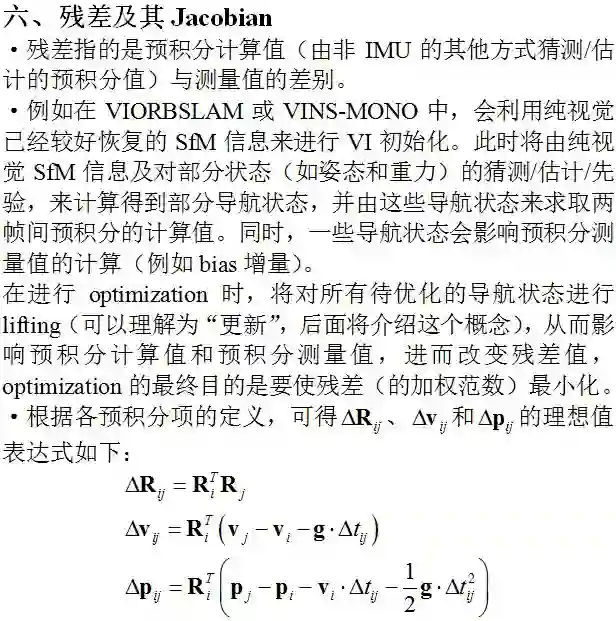
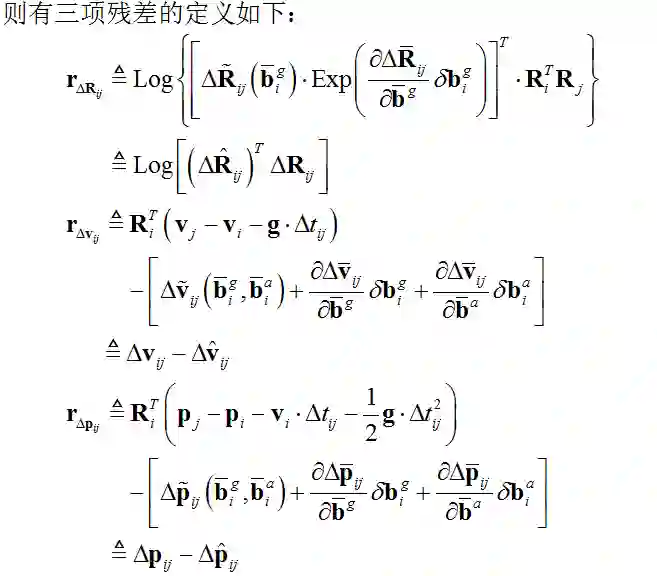
承接第二篇的内容,本篇将就bias估计值更新时预积分项的更新方式进行分析。另外对预积分的残差项及其Jacobian进行了介绍,详细的分析放在下一篇。





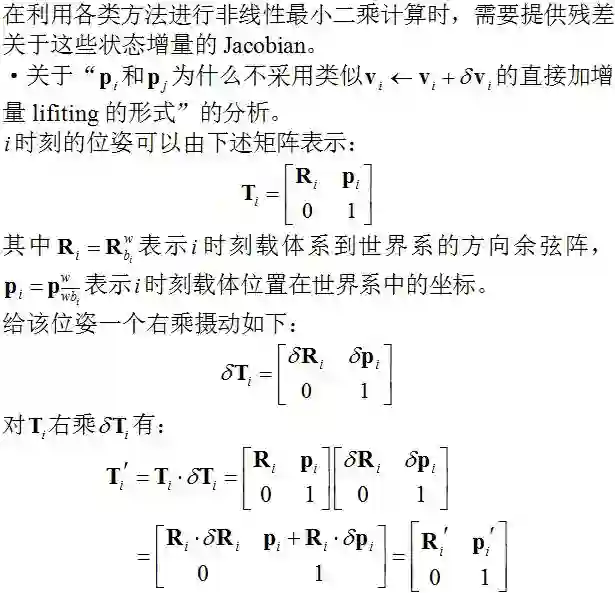
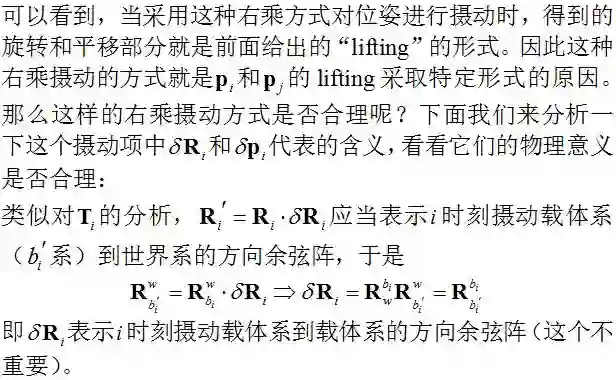
下一篇将对残差项及Jacobian进行详细展开。
由于篇幅的限制,文中部分公式非常小,这个系列更新完之后,会将完整版的pdf放出来,敬请期待。
本文由北航自动化学院在读博士邱笑晨投稿并编辑
如对内容有疑问和建议请联系ares43490@126.com




