【泡泡读者来稿】VINS 论文推导及代码解析(四)
崔华坤,SLAM算法工程师,主要研究方向是VIO。2011年硕士毕业于北京工业大学,毕业后从事六年的三维显示研发,从最初的裸眼3D显示到现在的AR显示,期间做出一款国内尺寸最大的裸眼3D LED屏。对作者感兴趣的可以加微信:cuihuakun。
7.闭环检测和优化
7.1 闭环检测
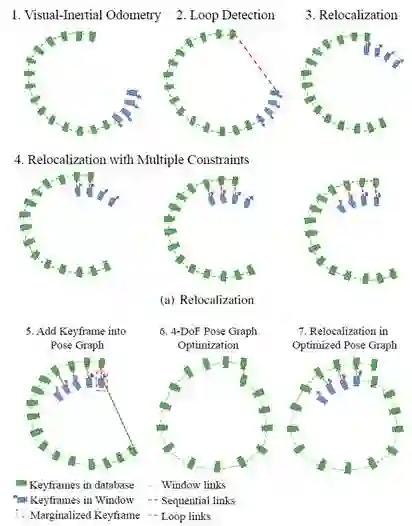
VINS是采用BRIEF描述子的DBoW2词袋进行闭环检测,因为前端识别的Harris角点数量通常只有70个(VINS-Mobile),对于闭环检测远远不够,因此会对新来的KeyFrame即后端非线性优化刚处理完的关键帧,再重新检测出500个FAST角点进行闭环检测用,同时对所有新老角点进行BRIEF描述(70个点的描述在computeWindowBRIEFPoint中,新的500个点在computeBRIEFPoint中,具体描述子代码在BriefExtractor::operator)。然后,将KF添加到数据中时(addKeyFrame),计算当前帧与词袋的相似度分数,并与关键帧数据库中所有帧进行对比,并进行闭环一致性检测,获得闭环的候选帧(detectLoop)。
当检测到闭环后,我们在findConnection函数中进行PnP求解相对位姿,首先利用BRIEF描述子对闭环对中老帧的500个FAST角点,和当前帧中的70个Harris角点进行基于描述子的邻域匹配(searchByBRIEF);当匹配点数大于阈值后,将匹配点对利用PnPRANSAC求基础矩阵进行RANSAC异常点剔除,并求解相对位姿存储在loop_info变量中用于后续的闭环优化使用(为何求PnP时要用新帧的3D点,老帧的2D点呢?!),当剔除后的匹配点仍超过阈值时,我们最终认为该候选帧是一个正确的闭环帧,并将闭环帧push到optimize_buf中。
7.2 快速重定位
当检测到当前帧与之前帧(记为第v帧)有闭环时,若开启快速重定位,即FAST_RELOCALIZATION为true时,会将第v帧的位姿和相关特征点作为视觉约束项,加到后端非线性优化的整体目标函数中,但是并未固定第v帧的位姿,只是用滑窗优化来更精确计算第v帧的位姿,从而计算出闭环帧之间的相对位姿关系。这样的目标函数可写为:

b. 闭环边(Loop edge):是指检测到闭环的两帧。
当运行时间越来越长,数据库将变得越来越大,导致闭环检测和闭环优化的耗时也将越来越长。虽然前面已经仅保留每帧图像的位姿和特征点描述子,已扔掉原始图像,但是当运行几小时后仍将无法实时。因此,我们将根据分布密度对数据库进行下采样,保留那些与周围帧的位置和角度不同的,而丢弃集中在一起的帧(代码对应KeyFrameDatabase::downsample)。
7.4 闭环优化
当从滑窗内滑出的帧与数据库中的帧为闭环帧时,则对数据库的所有帧进行闭环优化。因为前面已经跟重力对齐,因此根据重力方向可以观测出俯仰θ和翻滚ϕ角度,即pitch和roll可观。因此闭环优化时,我们仅优化位置x,y,z和偏航角yaw这四个自由度。
那么,第i帧和第j帧的残差可写成:

所有序列边和回环边的整体目标函数可写为:

其中,S为序列边,L为回环边,h(.)为huber核函数。对应代码为KeyFrameDatabase::optimize4DoFLoopPoseGraph,注意代码中采用的Ceres自动求导方式。
到目前为止,我们就完成了对整个轨迹的闭环优化。
7.5 程序逻辑
下面我们对闭环与后端优化的关系再进行详细说明。
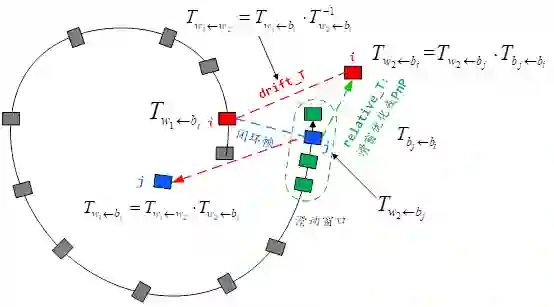
假设发生闭环的两帧为滑窗内的第j帧(蓝色帧),和数据库中的第i帧(红色帧)。令第i帧的位姿为T_(w_1←b_i ),第j帧的位姿为T_(w_2←b_j ),值得注意的是,两帧的世界系并不相同,滑窗所在的世界系w2为原世界系w1产生累积误差后的结果,重定位需要做的就是将w2改到w1。那么,根据PnP可得到两帧之间的相对位姿T_(b_j←b_i ),注意这里的PnP是用的第i帧的2D点和第j帧的3D点。但是PnP计算的相对位姿通常不准确,因此,可将PnP的结果作为初始值传到滑窗中,优化得到第i帧在世界系w2中的位姿T_(w_2←b_i )。为了将w2改到w1,我们计算累积偏移位姿:T_(w_1←w_2 )=T_(w_1←b_i )∙T_(w_2←b_i)^(-1),这样的话,就可以将当前的第j帧重定位到原世界系中:T_(w_1←b_j )=T_(w_1←w_2 )∙T_(w_2←b_j )。如下图所示:

下图给出了闭环检测和优化的程序流程图:
上图中,蓝线为正常的闭环优化流程,即通过后端的非线性优化来更新滑窗内所有相机的位姿。紫线为闭环检测模块,当后端优化完成后,会将滑窗内的次新帧进行闭环检测,即首先提取新角点并进行描述,然后与数据库进行检索,寻找闭环帧,并将该帧添加到数据库中。红线为快速重定位模块,当检测到闭环帧后,会将闭环约束添加到后端的整体目标函数中进行非线性优化,得到第i帧(注意这里的帧为闭环帧中的老帧)经过滑窗优化后的位姿,从而计算出累积的偏移误差,进而对滑窗内的位姿进行修正。
这里,也可以在四自由度优化后PoseGraph::optimize4DoF(),将优化后的T_(w_1←w_2 ),即对应代码中的drift_correct_r、drift_correct_t,传回给后端优化线程,来更新滑窗内的相机位姿Estimator::update_loop_correction()。
8.其他
8.1 选KF策略
代码对应在addFeatureCheckParallax。
首先,迭代image即当前帧检测到的每个路标点id,看看图4中的feature队列中是否包含,若不含,则添加到feature队列中;若包含,则添加到对应id的FeaturePerFrame队列。
然后,compensatedParallax2计算每个路标点在两幅图中的视差量,若视差量大于某个阈值或者当前帧跟踪的路标点小于某个阈值,则边缘化滑窗内最老的帧;否则,边缘化掉次新帧,即倒数第二帧。
8.2 后端优化后的变量更新
代码对应:Estimator::double2vector(),其中rot_diff是根据滑窗中第一帧在优化前后的yaw偏差计算得到的旋转矩阵,之后对滑窗内所有帧都进行rot_diff的校正。这是因为在后端滑动窗口的非线性优化时,我们并没有固定住第一帧的位姿不变,而是将其作为优化变量进行调整。但是,因为相机的偏航角yaw是不可观测的,也就是说对于任意的yaw都满足优化目标函数,因此优化之后我们将偏航角旋转至优化前的初始状态。
8.3 丢失后多地图融合
当丢失后,会从丢失位置重新初始化,并将相机位姿Pose修正为上次修正完drift后的Pose,并将posegraph中的drift清零,就修改R_(b_j)^w为R_(b_j_drift)^w,并在此基础上进行闭环优化。
同时,每次跟丢后的地图记为新地图,并跟老地图一块放到datebase中进行闭环检测,只是sequence++,当闭环检测成功后,将新老地图进行对齐融合。
8.4 小滑窗PnP优化
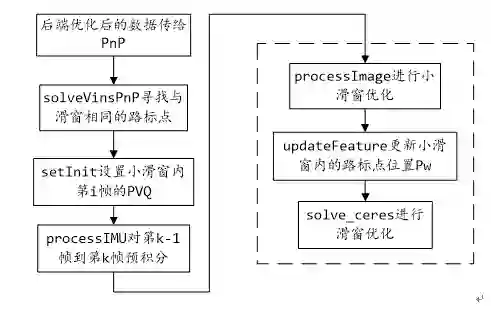
为了控制后端滑窗优化的计算量,通常是每隔几帧(比如3帧)选一帧送到后端处理。为了计算被舍弃的帧的位姿,在VINS-Mobile版本中,加入了一种轻量级的基于小滑窗的PnP+IMU联合优化方案,对应在代码vins_pnp.cpp中。实现流程如下图所示:
1.当后端优化完成后,将滑窗内的最新帧(假设第i帧)的信息(时间戳、PVQ、bias)给到FeatureTracker的solved_vins,并将滑窗中所有的路标点信息(id、P_w、被观测到的次数)给到FeatureTracker的solved_features。另外,通过GetImuMeasurements()函数计算两帧之间的IMU数据,送给FeatureTracker的imu_msgs,注意这里的两帧是前端获得的最新帧(假设第k帧,注意k>i)和上一个连续帧之间。如下图所示:

2.FeatureTracker::solveVinsPnP()中寻找第k帧中与滑窗中相同的路标点,计算该路标点在归一化相机系中的坐标,传给feature_msg;
3. vinsPnP::setInit()对PnP的小滑窗(比如6个相邻帧)内的PVQB进行赋值,当小滑窗内有第i帧时,则用从后端传过来的第i帧PVQ来更新;
4. processImu是进行第k-1帧和第k帧的预积分;
5. processImage中首先通过updateFeatures更新小滑窗中与第k帧有共视关系的帧的3D点坐标P_w,最后调用solve_ceres来优化小滑窗内的PVQ,不优化路标点,涉及的两个约束为:IMU的帧间约束,和每一帧的PnP(即每一帧的2D-3D观测)的视觉重投影误差约束,因子图如下所示:
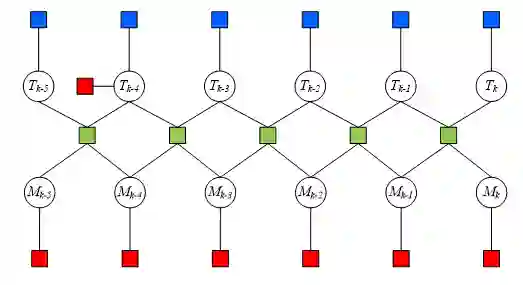
上图中,小方块为约束因子,圆圈为优化变量(这里路标点不是优化变量):T=[R|t],M=[v,b_a,b_w ],绿色小块为IMU约束,蓝色小块为PnP视觉约束,红色小块为先验约束,比如第k-4帧对应后端大滑窗的第i帧,因此信赖并固定住第k-4帧的T_(k-4)和M_(k-4);另外,固定住所有帧的bias。
9.参考文献
[1] T. Qin. VINS-Mono: A robust and versatile monocular visual-inertial state estimator. arXiv preprint arXiv: 1708.03852, 2017.
[2] N. Trawny. Indirect Kalman Filter for 3D Attitude Estimation. 2005.
[3] Sola. Quaternion kinematics for error-state kalman filter. 2017.
[4] K. Eckenhoff. Decoupled, Consistent Node Removal and Edge sparsification for graph-based SLAM. 2016.
[5] J. Engel. Direct Sparse Odometry. 2016.
[6] Sliding Window Filter with Application to Planetary Landing. 2010.
[7] S. Leutenegger. Keyframe-Based Visual-Inertial SLAM Using Nonlinear Optimization. 2015.
[8] “VINS-Mono代码分析总结”,https://www.zybuluo.com/Xiaobuyi/note/866099.
[9] 贺一家,“SLAM中的marginalization 和 Schur complement”,https://blog.csdn.net/heyijia0327/article/details/52822104.
请点击阅读原文获取完整解读!
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





