【泡泡一分钟】SqueezeSeg:用于3D激光雷达点云中道路物体实时分割、具有递归CRF的卷积神经网络
每天一分钟,带你读遍机器人顶级会议文章
标题:SqueezeSeg: Convolutional Neural Nets with Recurrent CRF for Real-Time Road-Object Segmentation from 3D LiDAR Point Cloud
作者:Bichen Wu, Alvin Wan, Xiangyu Yue and Kurt Keutzer
来源:IEEE International Conference on Robotics and Automation (ICRA),2018
编译:曹利浩
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

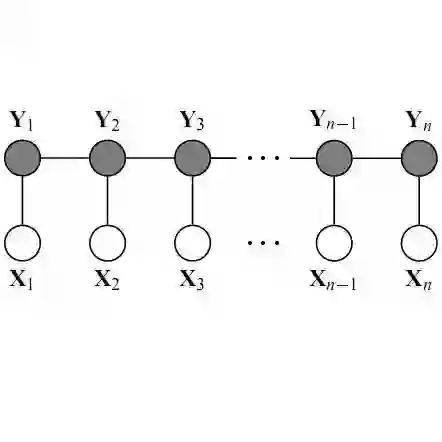
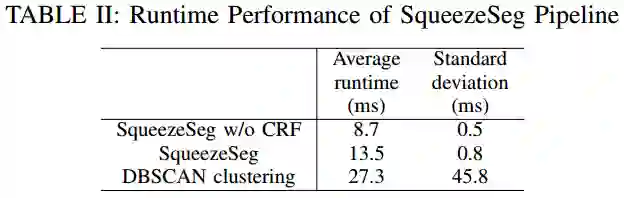
本文讨论了3D激光雷达点云中道路上物体的语义分割。尤其是希望检测和分类出感兴趣物体实例,例如汽车、行人和骑自行车的人。我们把这个问题表述为一个逐点分类问题,并且基于卷积神经网络(Convolutional Neural Networks, CNN)提出一个端到端的算法——SqueezeSeg:该CNN网络以变换后的点云作为输入,直接输出一个逐点标记的地图,然后使用作为RNN层的CRF(Conditional random field)改善该地图。最后使用传统的聚类算法获得实例级的标记。我们的CNN模型使用KITTI数据集中的激光雷达点云数据训练,分割需要的每个点的标签根据KITTI数据集中的3D边界框制作。为了获得额外的训练数据,我们在流行的视频游戏“Grand Theft Auto V(GTA-V)”中构建了一个激光雷达模拟器,以合成大量逼真的训练数据。实验结果表明,SqueezeSeg精度高,并且具有快速的和稳定的运行时间(每帧8.7±0.5ms),非常适合自动驾驶应用。另外,使用合成数据的额外训练提升了SqueezeSeg对真实世界数据的验证准确性。
源码地址:https://github.com/BichenWuUCB/SqueezeSeg
介绍和演示视频地址:https://youtu.be/Xyn5Zd3lm6s
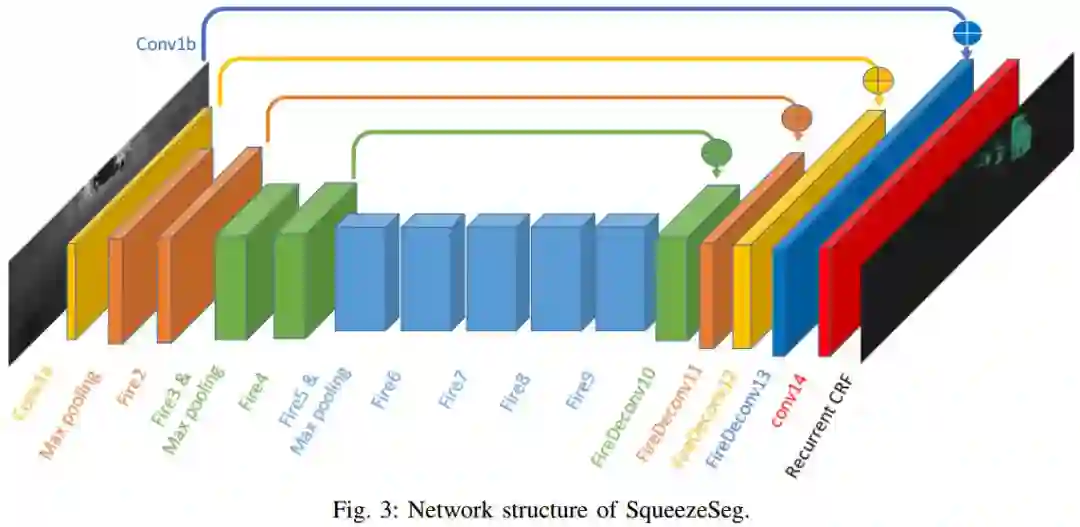
网络结构:
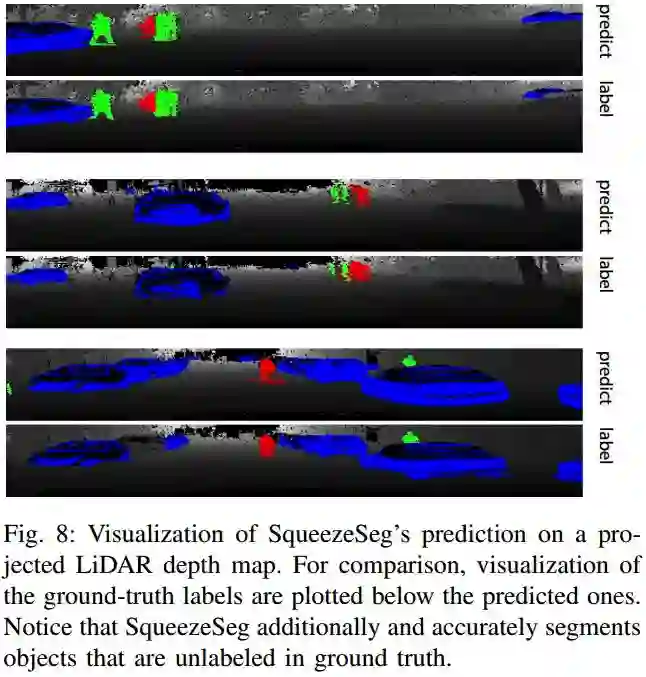
分割结果示例:
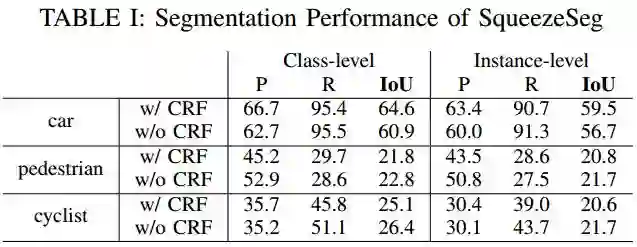
精度:
实时性:

Abstract
We address semantic segmentation of road-objectsfrom 3D LiDAR point clouds. In particular, we wish to detectand categorize instances of interest, such as cars, pedestriansand cyclists. We formulate this problem as a point-wise clas-sification problem, and propose an end-to-end pipeline calledSqueezeSeg based on convolutional neural networks (CNN):the CNN takes a transformed LiDAR point cloud as input anddirectly outputs a point-wise label map, which is then refined bya conditional random field (CRF) implemented as a recurrentlayer. Instance-level labels are then obtained by conventionalclustering algorithms. Our CNN model is trained on LiDARpoint clouds from the KITTI [1] dataset, and our point-wisesegmentation labels are derived from 3D bounding boxes fromKITTI. To obtain extra training data, we built a LiDARsimulator intoGrand Theft Auto V (GTA-V), a popular videogame, to synthesize large amounts of realistic training data.Our experiments show that SqueezeSeg achieves high accuracywith astonishingly fast and stable runtime (8.7±0.5ms perframe), highly desirable for autonomous driving. Furthermore,additionally training on synthesized data boosts validationaccuracy on real-world data. Our source code is open-sourcereleased. The paper is accompanied by a video containing ahigh level introduction and demonstrations of this work.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:ltt3
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com