【泡泡一分钟】三维卷积神经网络实现实时非模态三维目标检测
每天一分钟,带你读遍机器人顶级会议文章
标题:A 3D Convolutional Neural Network Towards Real-time Amodal 3D Object Detection
作者:Hao Sun, Zehui Meng, Xinxin Du and Marcelo H. Ang Jr
来源:IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),2018
编译:刘梦雅
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

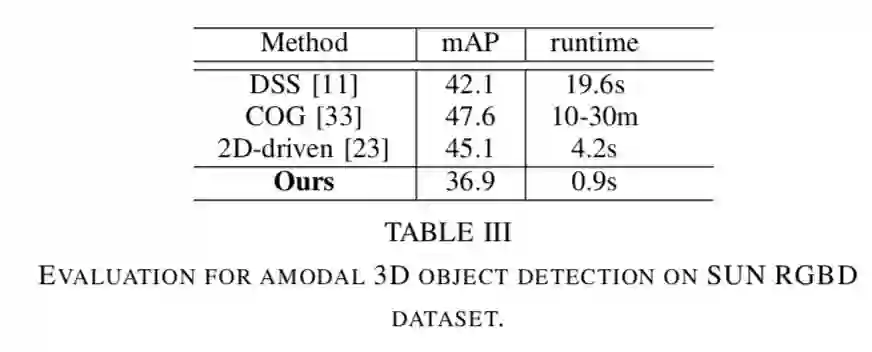
本文关注非模态三维目标检测任务,即预测目标在实际世界中的位置、维度、姿态以及所属类别。本文提出一种三维卷积神经网络,输入为一个小型室内场景,用体元表示,输出为三维目标检测得到的方框、目标所属类别以及姿态方向。与其他经典方法不同,本文算法并未利用区域划分技术来假设目标所在位置,算法将检测和识别问题看作一个回归问题,并在一个简单的网络中实现。我们的模型速度非常快,并且所有的预测结果都是有理有据的,均来自于点云的全局信息中。本文算法在两个标准数据集上进行了测试:NYUv2 RGBD 数据集和SUN RGBD 数据集。实验结果表明,本文算法在实现3维物体检测上,比起其他许多3D检测算法要快上几个数量级。
本文算法框架如下图所示:
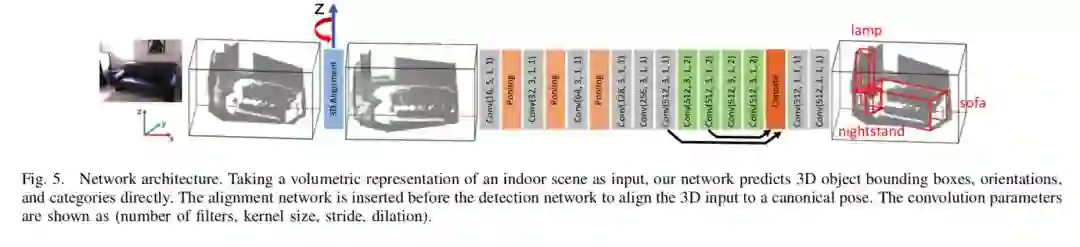
算法输入彩色图像的3D点云,并用体元表示,输入网络。网络首先进行一个对齐操作,主要实现将输入与规范姿势对齐,然后输入检测网络实现三维物体的检测、分类等等。实验结果表明,本文算法在三维目标检测上具有较好的效果,且运行时间大大缩短。

下图是一些检测情况的示意图,可见本文算法的有效性。


Abstract
We focus on the task of amodal 3D object detection, which is to predict object locations, dimensions, poses and categories in the real world. We introduce a 3D Convolutional Neural Network that takes a volumetric representation of an indoor scene as input and predicts 3D object bounding boxes, object categories, and orientations. Unlike prior state-of-the-arts, our approach does not depend on region proposal techniques to hypothesize object locations. We treat detection and recognition as one regression problem in a single network. Our elegant model is extremely fast and all predictions are reasoned from the global context of a point cloud in a continuous pipeline. We evaluate our approach on two standard datasets: the NYUv2 RGBD dataset and the SUN RGBD dataset. Experiments show that our approach is faster than start-of-the-art 3D detectors by several orders of magnitude towards real-time amodal 3D object detection.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:1t2l
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



