
题目: Review: deep learning on 3D point clouds
简介:
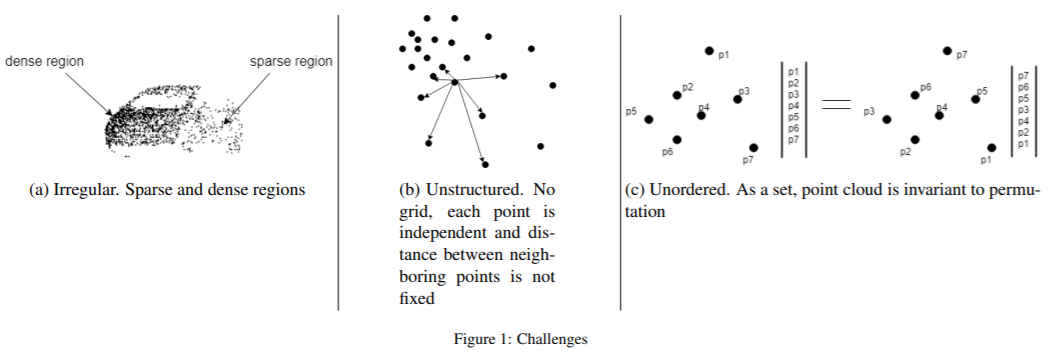
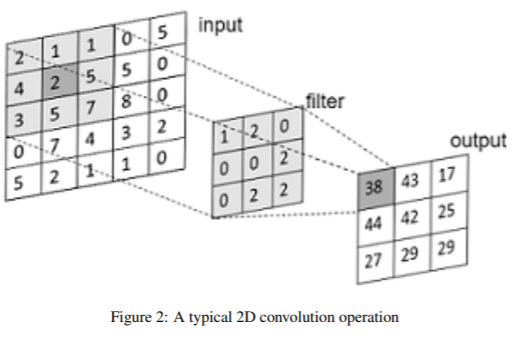
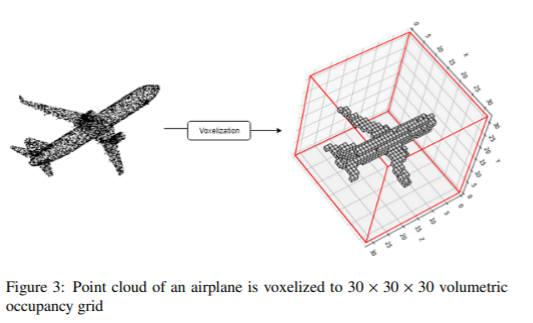
点云是在三维度量空间中定义的点集。点云已经成为三维表示中最重要的数据格式之一。由于激光雷达等获取设备的可用性增加以及机器人、自动驾驶、增强和虚拟现实等领域的应用增加,它越来越受欢迎。深度学习现在是计算机视觉中最强大的数据处理工具,成为分类、分割和检测等任务的首选技术。深度学习技术主要应用于具有结构化网格的数据,而点云则是非结构化的。点云的无结构使得深度学习直接处理点云非常具有挑战性。早期的方法通过将点云预处理成结构化的网格格式来克服这一挑战,代价是计算成本的增加或深度信息的丢失。然而,最近许多先进的深度学习技术正在开发中,这些技术可以直接操作点云。这篇论文包含了对当前最先进的深度学习技术的调查,这些技术主要集中在点云数据上。我们首先简要地讨论了在点云上直接使用深度学习所面临的主要挑战,我们还简要地讨论了通过将点云预处理成结构化网格来克服这些挑战的早期方法。然后,我们回顾了各种先进的深度学习方法,直接处理点云的非结构化形式。我们介绍了流行的3D点云基准数据集。我们还进一步讨论了深度学习在当前流行的三维视觉任务中的应用,包括分类、分割和检测。
作者:
王程,福建省特支“双百计划”入选者、福建省科技创新领军人才、厦门大学计算机科学系教授、博士生导师、副院长。研究方向:三维视觉,空间大数据分析,激光雷达,虚拟/增强现实。个人主页:http://www.cwang93.net/#
成为VIP会员查看完整内容
相关内容

专知会员服务
51+阅读 · 2020年2月22日
专知会员服务
34+阅读 · 2019年12月25日
专知会员服务
35+阅读 · 2019年11月18日



相关VIP内容
专知会员服务
51+阅读 · 2020年2月22日
专知会员服务
34+阅读 · 2019年12月25日
专知会员服务
35+阅读 · 2019年11月18日
相关资讯
相关论文