【泡泡点云时空】RSNet:用于3D点云分割的递归切片网络(CVPR2018-14)
泡泡点云时空,带你精读点云领域顶级会议文章
标题:Recurrent Slice Networks for 3D Segmentation of Point Clouds
作者:Qiangui Huang, Weiyue Wang, Ulrich Neumann
来源:IEEE Conference on Computer Vision and Pattern Recognition (CVPR),2018
音频:杨柳 、卜德飞
编译:赵林(硕士,北京理工大学ININ实验室,控制科学与工程专业,研究方向:无人驾驶中的感知问题)
审核:郑英林
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

点云是一种有效表征三维信息的数据格式,但是现有的用于点云的3D分割方法要么不对局部依赖性关系建模,要么需要增加计算量。这项工作提出了一种新的3D分割框架:RSNet,它可以有效地建模点云中的局部结构。RSNet中的关键组件是一个轻量级的局部依赖模块,该模块由一种新的切片池化层、递归神经网络(RNN)层和一种新的上池化(unpooling)层组合而成。切片池化层被设计为将无序点的特征投射到一个有序的特征向量序列上,这样就可以应用传统的端到端学习算法(RNNs)。我们通过在S3DIS、ScanNet和ShapeNet数据集上进行综合实验验证了RSNet的性能。在最简单的形式中,RSNets超越了这些基准测试中所有以前最先进的方法。我们通过和先前最先进的方法比较论证了RSNets的效率。

图1:RSNet采用原始点云作为输入,输出每个点的语义标签
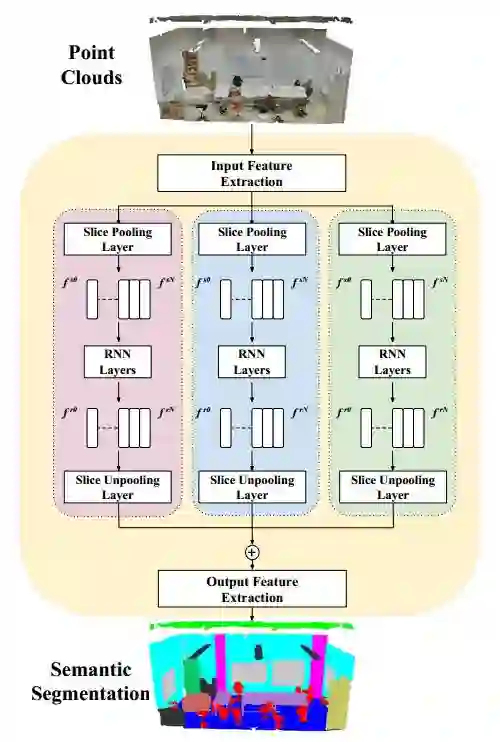
图2:这里为RSNet网络的示意图,图中三个平行分支表示沿x、y和z轴的切片方向
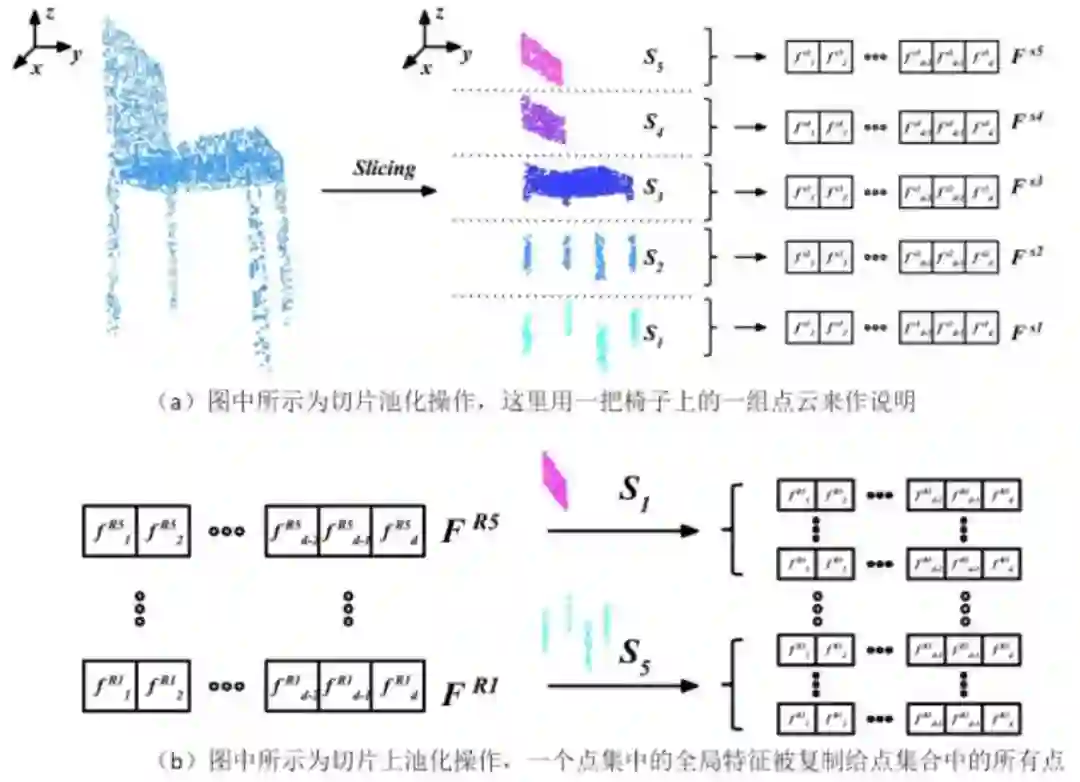
图3:切片池化、切片上池化操作以及用于切片结构的RNN模型的图解
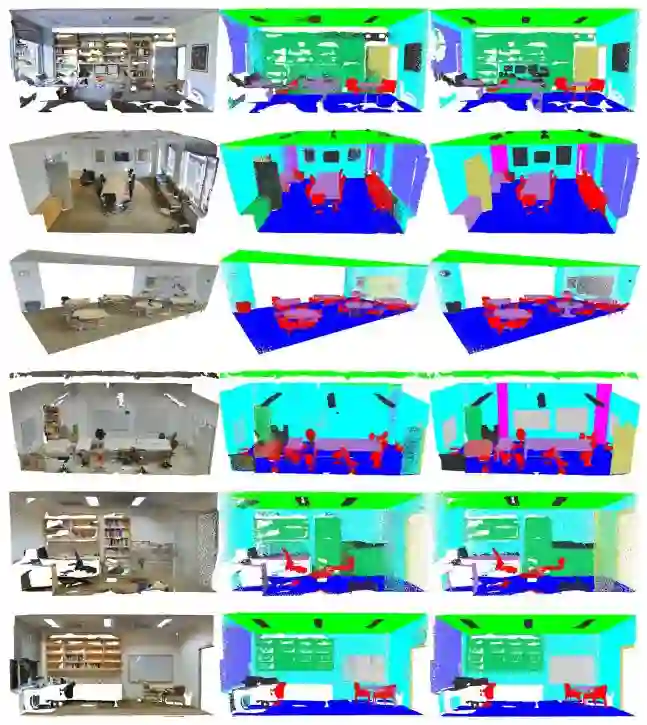
图4:在S3DIS数据集上的样例分割结果,从左到右分别是输入的场景、由RSNet产生的结果以及标定好的真实数据(ground truth)
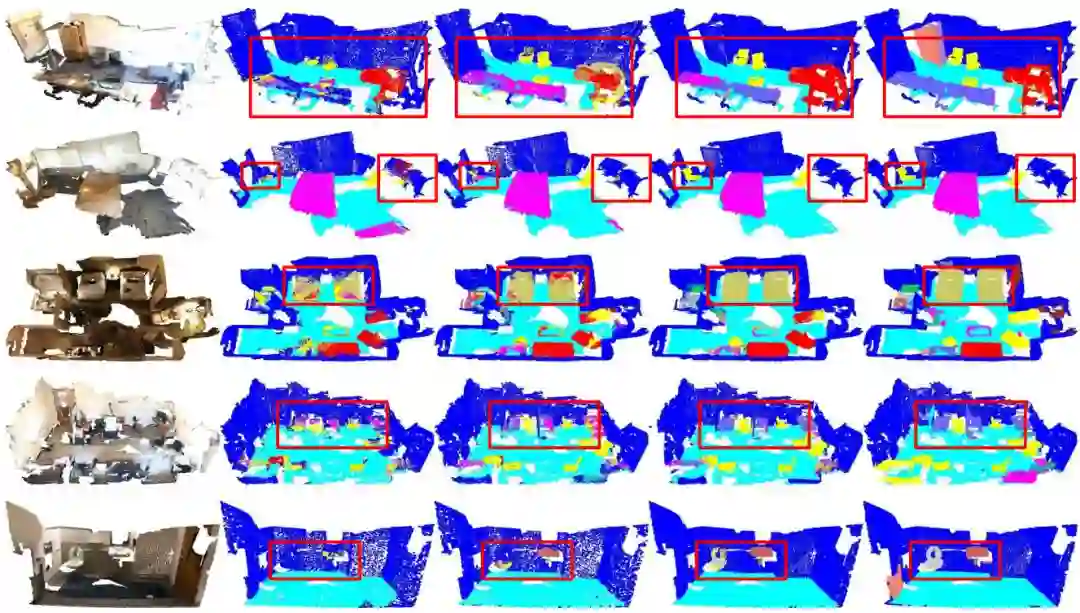
图5:在ScanNet数据集上的样例分割结果,从左到右分别是输入的场景、由PointNet、PointNet++、RSNet产生的结果以及标定好的真实数据(ground truth)。红色的边界框突出显示感兴趣区域,放大后查看效果更佳

Abstract
Point clouds are an efficient data format for 3D data.However, existing 3D segmentation methods for point clouds either do not model local dependencies or require added computations. This work presents a novel 3D segmentation framework, RSNet1, to efficiently model local structures in point clouds. The key component of the RSNet is a lightweight local dependency module. It is a combination of a novel slice pooling layer, Recurrent Neural Network (RNN) layers, and a slice unpooling layer. The slice pooling layer is designed to project features of unordered points onto an ordered sequence of feature vectors so that traditional end-to-end learning algorithms (RNNs) can be applied. The performance of RSNet is validated by comprehensive experiments on the S3DIS, ScanNet, and ShapeNet datasets. In its simplest form,RSNets surpass all previous state-of-the-art methods on these benchmarks. And comparisons against previous state-of-the-art methods demonstrate the efficiency of RSNets.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以点击阅读原文获得链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



