【泡泡一分钟】将3D全卷积网络应用于车辆激光点云处理 (IROS-11)
每天一分钟,带你读遍机器人顶级会议文章
标题:3D Fully Convolutional Network for Vehicle Detection in Point Cloud
作者:Bo Li
来源:IROS 2017
播音员:刘畅
编译:宋方
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

今天为大家带来的文章是——将3D全卷积网络应用于车辆激光点云处理,该文章发表于IROS 2017。
2D全卷积网络已经成功的应用于检测图像中的对象。我们将激光点云映射到为三维空间,该三维空间由许多边长10厘米的立方体拼接而成。将该空间作为3D全卷积网络的输入,这样充分利用了激光点云的三维信息。将三维数据输入全卷积网络后,通过三次反卷积提取特征图后,分别输出两个空间。一个空间用于判断一个对象的类别。另一空间用于估计某一对象的具体坐标。
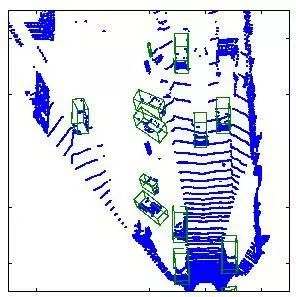
图1 蓝色为激光点云,绿色为车辆包围盒
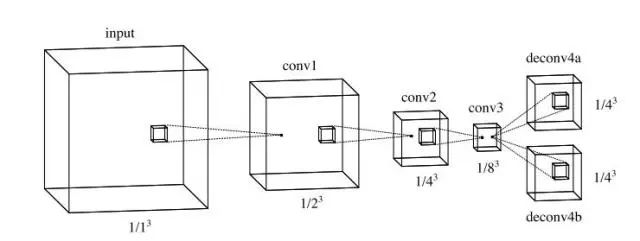
图2 通过三次卷积提取特征图后,输出两个空间,用于识别对象类别与估计对象位置
最后将KITTI数据集中的激光点云按交通环境车辆类别进行分类标记,分为卡车、乘用车、行人等。使用KITTI数据集进行训练与验证网络。
Abstract
2D fully convolutional network has been recently successfully applied to the object detection problem on images.In this paper, we extend the fully convolutional network based detection techniques to 3D and apply it to point cloud data. The proposed approach is verified on the task of vehicle detection from lidar point cloud for autonomous driving. Experiments on the KITTI dataset shows significant performance improvement over the previous point cloud based detection approaches.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



