【泡泡一分钟】3D重建下的摄像头不确定计算(3dv-6)
每天一分钟,带你读遍机器人顶级会议文章
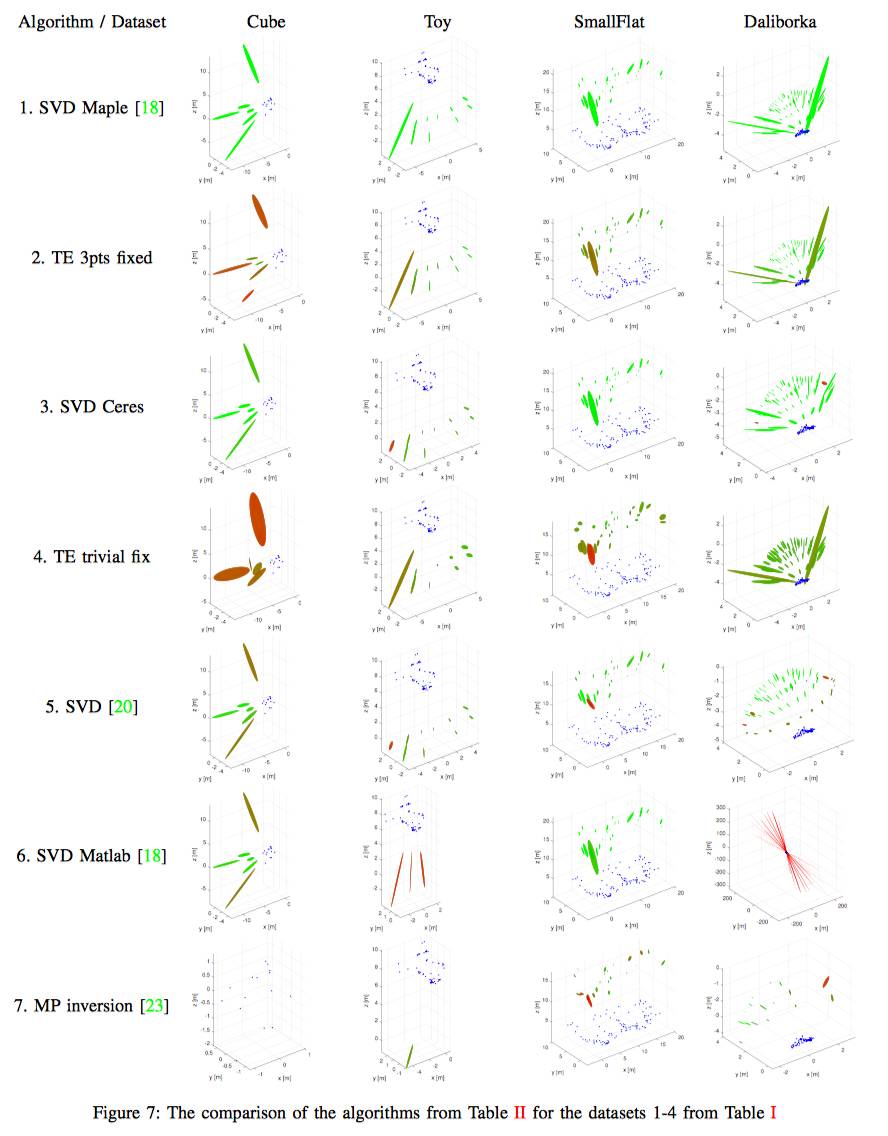
标题:Camera Uncertainty Computation in Large 3D Reconstruction
作者:Michal Polic and Tomas Pajdla
来源:Czech Institute of Informatics, Robotics and Cybernetics Czech Technical University in Prague
播音员:朱英
编译:赵江龙 周平
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

在计算机视觉中,运动管道的大尺度结构一般不能通过测量传播误差的估计参数来评估重建的质量。
这是一个数值敏感和计算上具有挑战性的过程,在实践中的大场景这是不容易实现。所以我们提出了一种新的算法,提高了计算精度的不确定性传播。
这种算法与数以百万计的特征点、数千台摄像机和数百万个3D点在一台计算机上协同工作。我们做了一个实验比较,在准确的地面实况下,用我们的方法和以前的方法进行实验,并证明我们的算法是实用的。
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
回复关键字“110”,即可获取本文下载链接。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com
登录查看更多
相关内容

3DV(3D视觉)会议提供了一个绝佳的平台,用于传播研究结果,涵盖计算机视觉和图形3D研究领域的广泛主题,包括新型光学传感器,信号处理,几何建模,表示和传输,可视化和交互以及各种应用程序。
官网地址:https://dblp.uni-trier.de/db/conf/3dim/
Arxiv
3+阅读 · 2018年7月5日





相关VIP内容
相关资讯
相关论文
Arxiv
3+阅读 · 2018年7月5日