【泡泡一分钟】一种紧凑的三维重建模型表示方法(CVPR-15)
每天一分钟,带你读遍机器人顶级会议文章
标题:Compact Model Representation for 3D Reconstruction
作者:Jhony K. Pontes, Chen Kong, Anders Eriksson, Clinton Fookes Sridha Sridharan, Simon Lucey
来源:CVPR 2017
编译:王慧国
播音员:火箭姚小麦
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

今天介绍的文章是“Compact Model Representation for 3D Reconstruction ”——一种紧凑的三维重建模型表示方法,该文章发表在CVPR2017。
在计算机视觉中,从2D图像中恢复3D结构是一个核心问题。近来的工作已经聚焦在从单幅图像中直接重建三维结构了。我们知道仅仅一幅图像是不能提供重建需要的全部信息。目前被大家所广泛接受的是具备先验的3D CAD模型。一个基本问题是如何简洁地表示数以百万计的CAD模型,同时允许用精细的几何图形来概括新的看不见的物体。
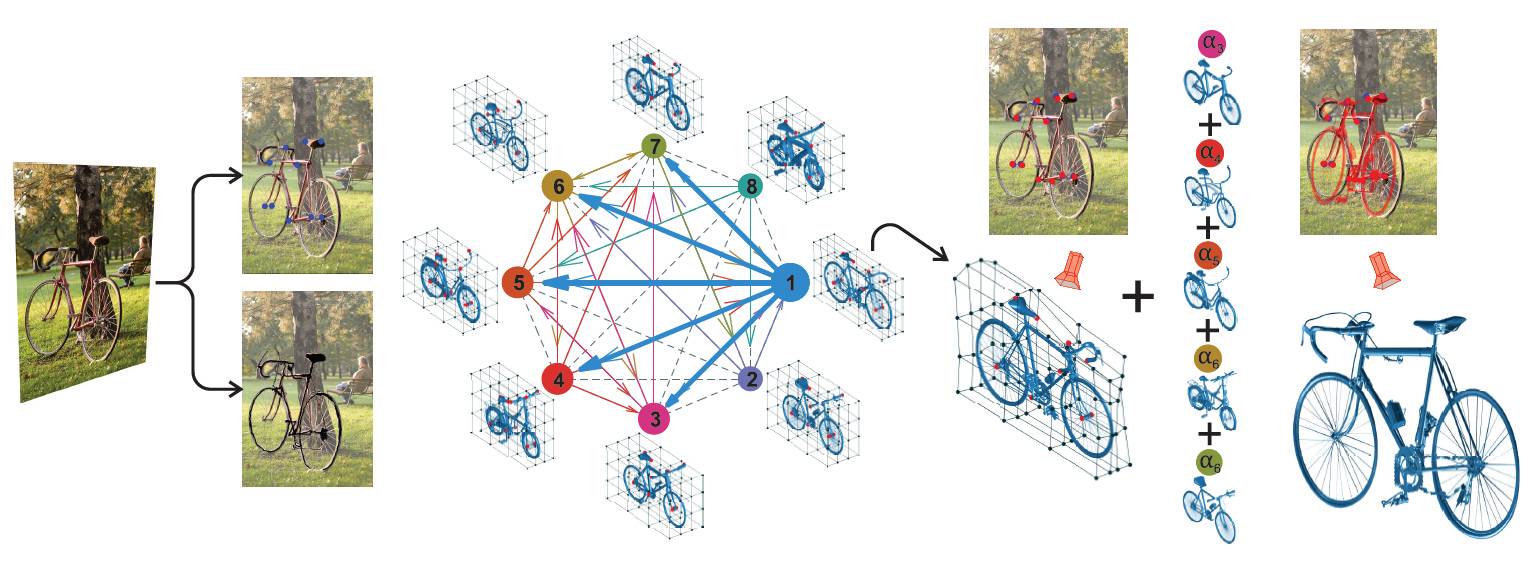
我们引入了一种紧凑的表示3D网格的方法。我们的方法首先使用一种新的自由变形(FFD)3D-2D注册来从图结构中选择一个三维模型,选择的模型是最符合图像轮廓的。我们做了一个全面的定量和定性分析,并且展示了从单个图像中得到的令人满意的稠密和逼真的三维重建结构。
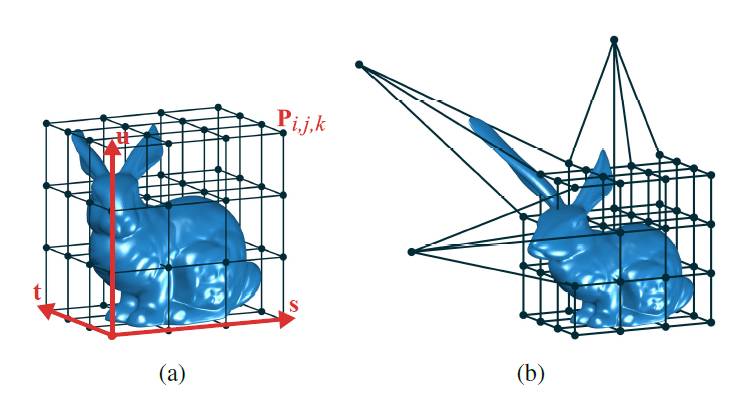
另外,文章中一个核心的技术就是FFD,即自由形式变形,如果你对这部分有迷惑的地方,可以自行查阅相关文献书籍,形式如下图这样。
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
回复关键字“FFD”,即可获取本文下载链接。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




