【泡泡一分钟】基于改良CNN监督模型的单目人体三维动作姿态估计(3dv-13)
每天一分钟,带你读遍机器人顶级会议文章
标题:Monocular 3D Human Pose Estimation In TheWild Using Improved CNN Supervision
作者:Dushyant Mehta, Helge Rhodin, Dan Casas, Pascal Fua, Oleksandr Sotnychenko, Weipeng Xu, and Christian Theobalt
来源:3DV 2017 ( International Conference on 3D Vision)
播音员:朱英
编译:陈诚 周平
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

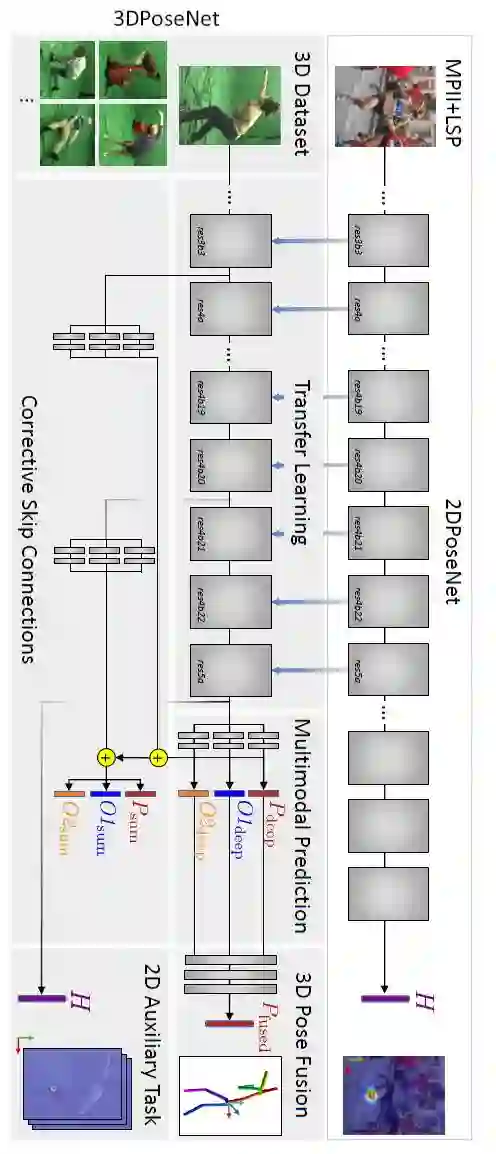
我们提出一种用卷积神经网络来从单一RGB图像估计人体三维肢体动作的方法,并且也解决了公开数据中运动模型有限并且不具有一般性的问题。利用已有的三维姿态数据和二位姿态数据,我们将训练好的特征转移并且在实际场景中一般化。在现有的数据集上测试,我们的算法展示出了最高的水准并且具有一般性。同时我们也引出一个新的数据集。我们用一个多相机的视觉活动捕捉系统将所有的人体的肢体活动的真实数据由记录下来,并且我们的数据不依赖人工标记。这这数据集包含了非常多的贴近真实情况的复杂因素和其多样性,比如姿态,相貌,不同的衣着,遮挡,相机采集视角并且也利用增强现实提升了数据维度。
与此同时,我们也提供了一个全新的包括室外,室内的基准数据,并且我们这些数据比现有的数据的更加接近真实场景。总之,我们认为,利用结合转移特征表达,算法以及更多数据是解决一般意义下的三维肢体姿态估计这个问题的关键条件。
附算法简要流程及CNN训练方法说明图:

如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
在【泡泡机器人SLAM】公众号(paopaorobot_slam)中回复关键字“3DV-13”,即可获取本文下载链接。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


