【泡泡一分钟】动态环境下的高效长时间建图
每天一分钟,带你读遍机器人顶级会议文章
标题:Efficient Long-term Mapping in Dynamic Environments
作者:Mar‘a T. Ĺazaro, Roberto Capobianco and Giorgio Grisetti
来源:IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),2018
编译:王丹
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

随着自主机器人越来越多地被引入长时间运行的现实环境中,长时间建图的难点正引起机器人学研究界的关注。本文提出了一个完整的SLAM系统,能够跨单个或多个地图会话处理环境的动态性。
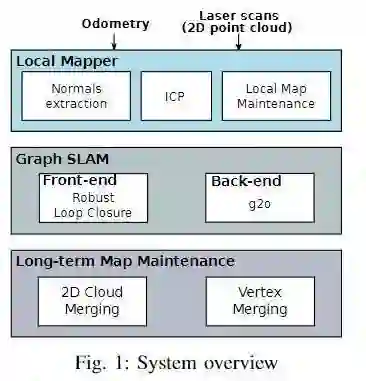
图1 系统框架
使用姿态图SLAM范例,系统以二维点云数据的形式处理局部地图,这些数据随时间更新以存储环境的最新状态。我们系统的核心是一个有效的基于ICP的对齐和合并程序,用于处理云中的非静态实体。此外,系统通过在鲁棒的会话间和会话内回环检测时移除过时的节点来保留图复杂度,同时通过使用压缩测量来保持图一致性。利用长期SLAM数据集中的真实数据进行实验,证明了该系统在长期机器人操作过程中建图问题的管理效率、准确性和有效性。
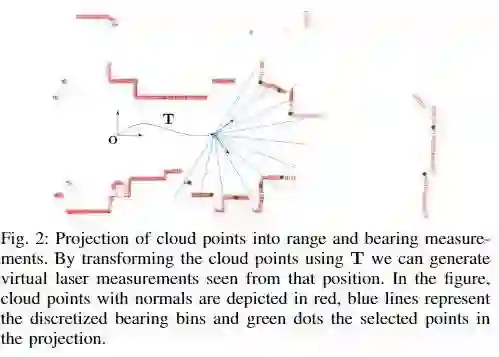
图2 将云点转为量程和方位测量。通过利用T变换云点,我们可以产生从那个位置看到的虚拟激光测量。图中,红色表示法线云点,蓝色线表示离散的承载箱,绿色点表示投影中选定的点。
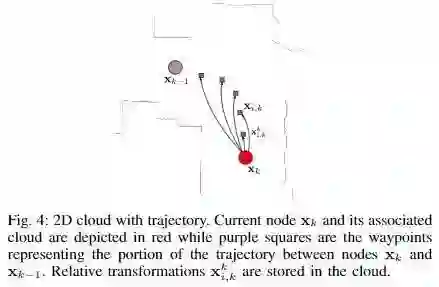
图4 带有轨迹的2D云。 当前节点xk及其相关联的云用红色描绘,而紫色方块是表示节点xk和xk-1之间的轨迹部分的路径点。 相对变换xki,k存储在云中
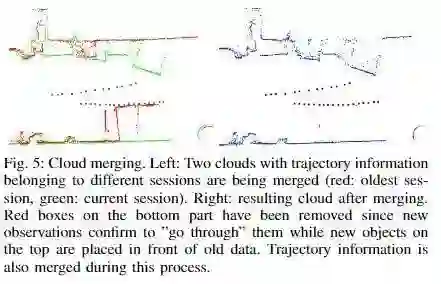
图5 云合并。 左:具有属于不同会话的轨迹信息的两个云正在合并(红色:最旧的会话,绿色:当前会话)。 右:合并后生成的云。底部的红色框已被删除,因为新的观察确认“通过”它们,而顶部的新对象放在旧数据前面。 在此过程中也会合并轨迹信息
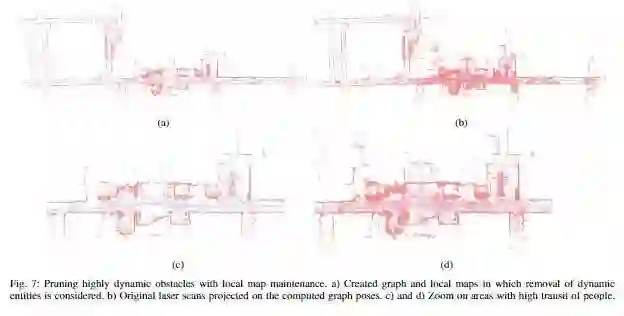
图7 在本地地图维护下运行高度动态的障碍物。a)创建的图和局部地图,其中考虑了动态实体的移除。b)投影在计算图形上的原始激光扫描。c)和d)放大高迁移率的人的区域

Abstract
As autonomous robots are increasingly being introduced in real-world environments operating for long periods of time, the difficulties of long-term mapping are attracting the attention of the robotics research community. This paper proposes a full SLAM system capable of handling the dynamics of the environment across a single or multiple mapping sessions.
Using the pose graph SLAM paradigm, the system works on local maps in the form of 2D point cloud data which are updated over time to store the most up-to-date state of the environment.The core of our system is an efficient ICP-based alignmen and merging procedure working on the clouds that copes with non-static entities of the environment. Furthermore, the system retains the graph complexity by removing out-dated nodes upon robust inter- and intra-session loop closure detections while graph coherency is preserved by using condensed measurements. Experiments conducted with real data from long-term SLAM datasets demonstrate the efficiency, accuracy and effectiveness of our system in the management of the mapping problem during long-term robot operation.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





