【泡泡图灵智库】用于语义SLAM的概率数据关联(ICRA)
泡泡图灵智库,带你精读机器人顶级会议文章
标题:Probabilistic Data Association for Semantic SLAM
作者:Sean L. Bowman,Nikolay Atanasov, Kostas Daniilidis,George J. Pappas
来源: ICRA 2017
编译:皮燕燕
审核:杨小育
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——用于语义SLAM的概率数据关联,该文章发表于ICRA 2017。
传统的同步定位和建图(SLAM)方法依赖于几何特征,如点,线和平面。他们无法为环境中观察到的地标定义语义标签。此外,基于几何特征的闭检测通常依赖于视点并且无法在模糊或重复纹理的环境中使用。另一方面,物体识别方法可以推断出地标的种类和尺度,从而产生一小组易于识别的地标,非常适合于与视图无关的明确环路。但是,当地图里存在个对象是相同类时,就会存在关键的数据关联问题。虽然数据关联和识别通常是使用离散推理解决的离散问题,但是经典SLAM是对度量信息的连续优化。本文集成度量信息、语义信息和数据关联信息定义了传感器状态和语义标志位置的优化问题。该优化问题集成了度量信息,语义信息和数据关联,论文将其分解为两个相互关联的问题:离散数据关联和地标种类概率的估计,以及连续的优化度量状态。地标和机器人姿态的估计会影响关联和种类分布,反过来,影响机器人-地标姿态优化。本论文的算法性能在室内和室外数据集上得到验证。
主要贡献
本文的主要贡献有:
1、本文的方法是第一个将惯性、几何和语义标签紧密结合到一个优化框架中的方法。
2、本文将联合度量语义SLAM问题的形式化分解为连续(姿态)和离散(数据关联和语义标签)优化子问题。
3、本文在几个真实的室内和室外长轨道数据集上进行了实验,考量了在复杂场景和不同光照条件下的测距和视觉测量精度。
算法流程
1、不同于最大似然数据关联估计,论文以权重wi定义数据关联分布为p(D | Xi,Li,Z):(“E”步骤)。
2、在先期计算的分布上最大化预期值(“M”步骤)。
3、描述语义slam。
4、基于EM实现语义slam。
主要结果
1、在第一个办公室实验所得的语义地图如图1所示。

图1 第一个办公室实验所得的轨迹和地标
2、基于本文的算法、ROVIO视觉 - 惯性里程计算法和ORB-SLAM2视觉SLAM算法估计所得的轨迹在x-y平面上的对比结果,如图2所示。
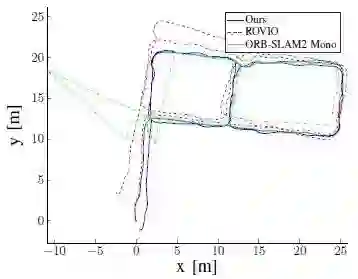
图2 不同算法估计所得的轨迹
3、第二个办公室实验估计的轨迹以及地标如图3所示。

图3 估计的轨迹(蓝色)和地标位置和种类
4、基于本文算法得到的顶层上的估计轨迹的部分被叠加在图5中的部分真实图(两者手动对准)上。基于本文算法得到的估计轨迹(蓝线)和估计的门位置(蓝色圆圈),覆盖到部分地面实况图(红色)以及地面真实门位置(绿色方块)。
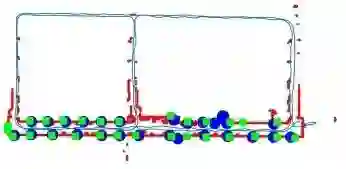
图4 基于本文的算法估计结果与真实地图对比
5、基于ORB-SLAM2算法在闭环检测不正确后得到的部分轨迹估计如图5所示。
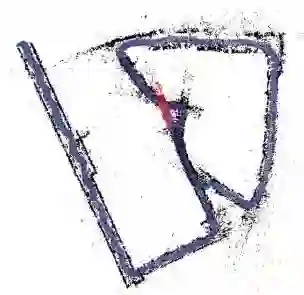
图5 在第二办公室实验中闭环检测不正确时得到的部分轨迹。
6、vicon轨迹和估计的椅子位置如图6所示。
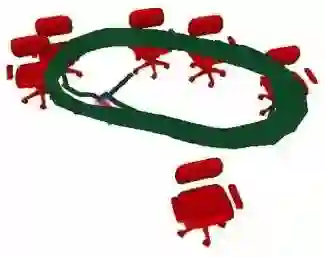
图6 vicon 实验中估计的轨迹和的地标
7、 如图7所示,论文比较了基于本文的算法,ROVIO和ORBSLAM2相对于vicon的位置误差。
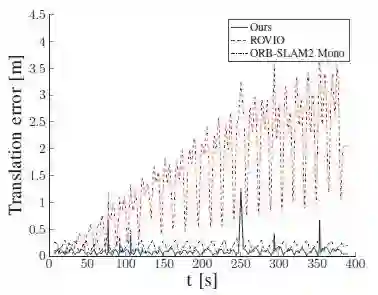
图7 相对于vicon信息的位置误差
8、本文在里程计因子中将预先积分的惯性相对姿态替换为VISO获得的相对姿态。图8给出了基于KITTI 05序列, 本文的算法,VISO、单目ORB-SLAM2和立体相机ORB-SLAM2计算所得相对于真实位置的绝对位置误差随时间的变化。应用于序列06的结果,如图9所示。
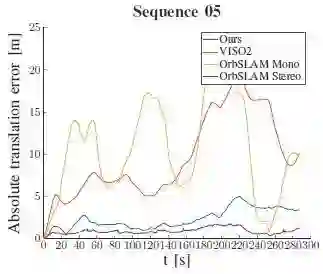
图8 基于KITTI 05序列得到的估计与真实位置之间的位置误差
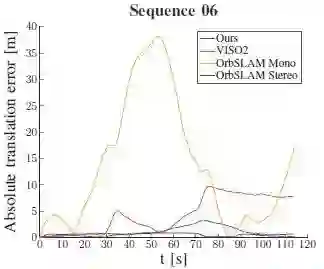
图9 基于KITTI 06序列得到的估计与真实位置之间的位置误差
9、不同算法对KITTI数据集中所有长度为100,200,...,800的子路径的平均平移和旋转误差如图10所示。
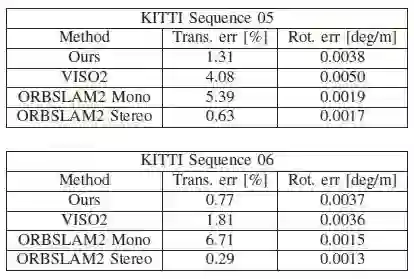
图10 KITTI中表示路径长度为(100,200,...,800)米的平移和旋转误差。

Abstract
Traditional approaches to simultaneous localization and mapping (SLAM) rely on low-level geometric features such as points, lines, and planes. They are unable to assign semantic labels to landmarks observed in the environment. Furthermore, loop closure recognition based on low-level features is often viewpoint-dependent and subject to failure in ambiguous or repetitive environments. On the other hand, object recognition methods can infer landmark classes and scales, resulting in a small set of easily recognizable landmarks,
ideal for view-independent unambiguous loop closure. In a map with several objects of the same class, however, a crucial data association problem exists. While data association and recognition are discrete problems usually solved using discrete inference, classical SLAM is a continuous optimization over metric information. In this paper, we formulate an optimization problem over sensor states and semantic landmark positions that integrates metric information, semantic information, and data associations, and decompose it into two interconnected problems: an estimation of discrete data association and landmark class probabilities, and a continuous optimization over the metric states. The estimated landmark and robot poses affect the association and class distributions, which in turn affect the robot-landmark pose optimization. The performance of our algorithm is demonstrated on indoor and outdoor datasets.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




