【泡泡一分钟】优化对比度增强以提高SLAM重定位环境中视觉跟踪的稳健性
每天一分钟,带你读遍机器人顶级会议文章
标题:Optimized Contrast Enhancements to Improve Robustness of Visual Tracking in a SLAM Relocalisation Context
作者:Xi Wang, Marc Christie, Eric Marchand
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:倪志鹏
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

SLAM技术在光线变换条件下的稳健性仍然是机器人技术的核心问题。随着场景照明的改变,会由于对比度较低的原因而不能正确地提取到特征点,或者由于描述符有很大的差异而不匹配。
在本文中,我们提出了一种多层图像表示(MLI),其中每层在跟踪过程中保持当前图像的对比度增强版本,以便改进检测和匹配。我们展示了如何使用互信息来增强每层图像的动态对比度。与ORB-SLAM方案比较发现,在合成环境中和真实环境中,这种方法显著提高了动态光线变化条件下的稳健性。
这项工作着重在两种特定环境中研究SLAM重定位问题,其中一种是在参考视频中构建地图,第二种是在具有光变化条件下给地图中的相机重新定位。
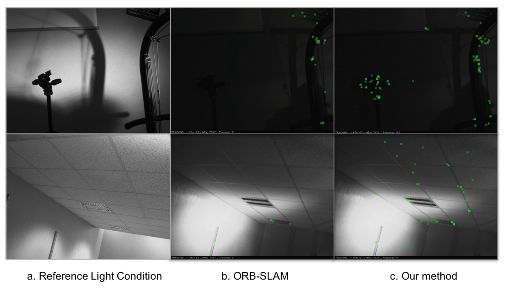
在不同光线条件下特征点追踪的结果。相较于在参考条件下(图a)和标准ORB-SLAM方案条件下(图b),我们的MLI方法(图c)匹配的特征点更多。

Abstract
Robustness of indirect SLAM techniques to light changing conditions remains a central issue in the robotics community. With the change in the illumination of a scene,feature points are either not extracted properly due to low contrasts, or not matched due to large differences in descriptors.In this paper, we propose a multi-layered image representation(MLI) in which each layer holds a contrast enhanced version of the current image in the tracking process in order to improve detection and matching. We show how Mutual Information can be used to compute dynamic contrast enhancements on each layer. We demonstrate how this approach dramatically improves the robustness in dynamic light changing conditions on both synthetic and real environments compared to default ORB-SLAM. This work focalises on the specific case of SLAM relocalisation in which a first pass on a reference video constructs a map, and a second pass with a light changed condition relocalizes the camera in the map.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



