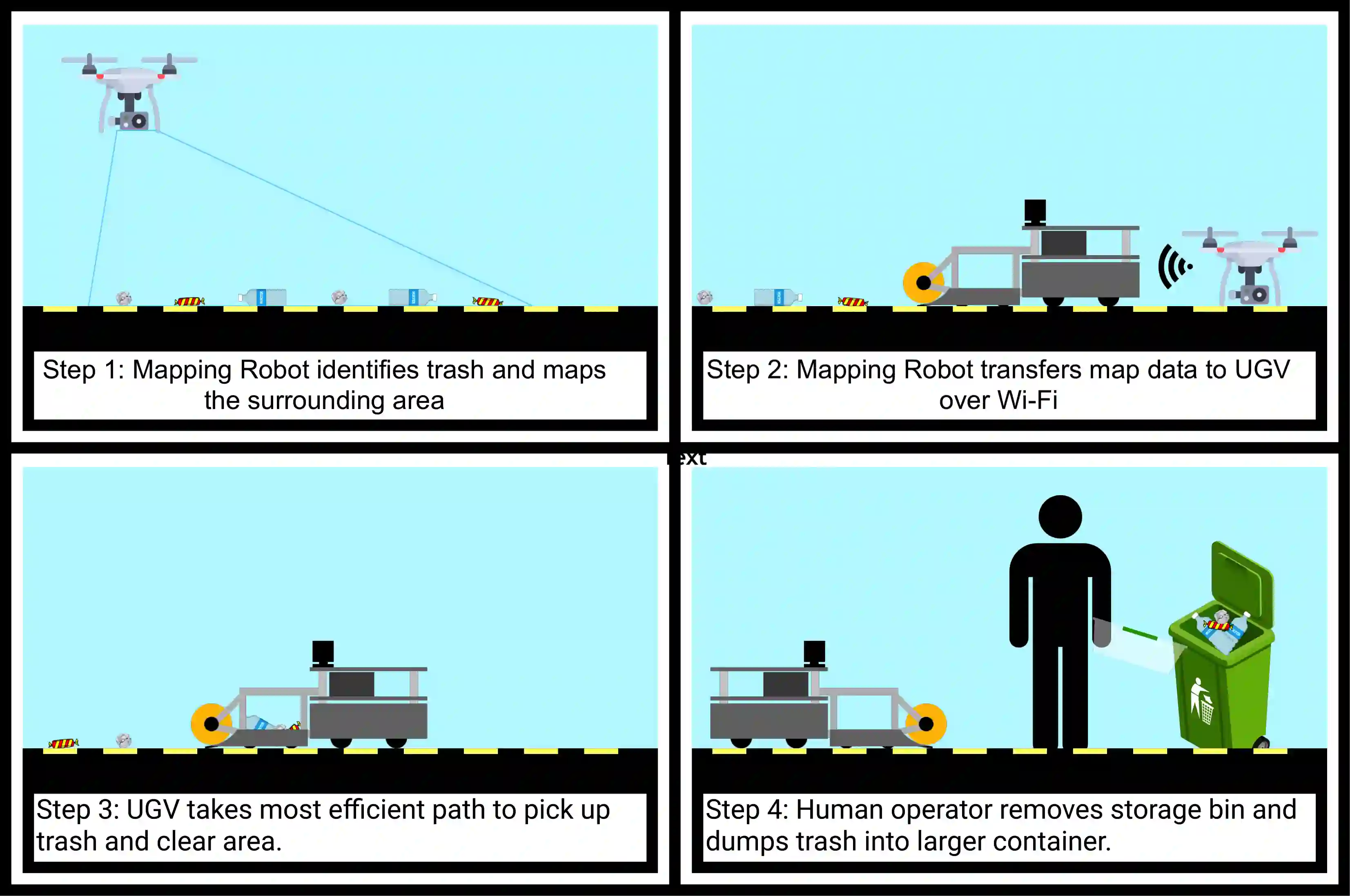
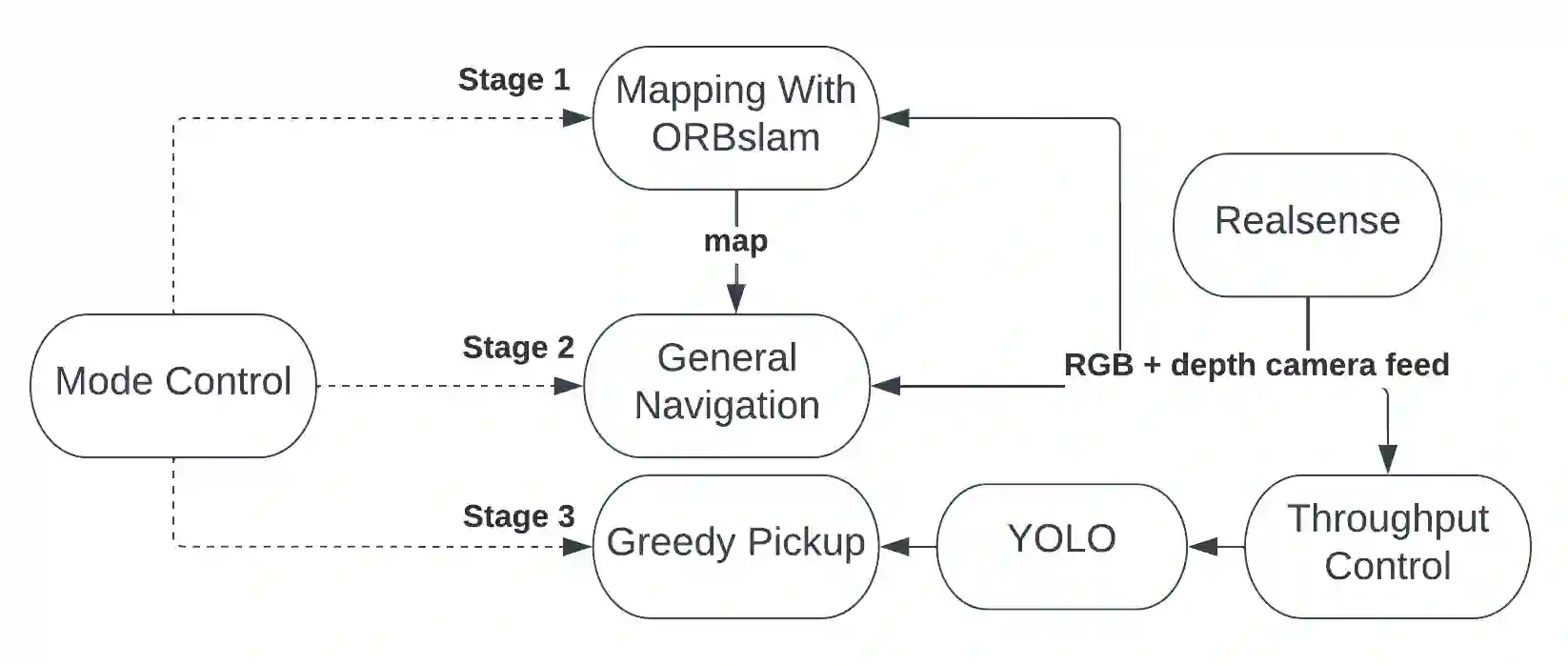
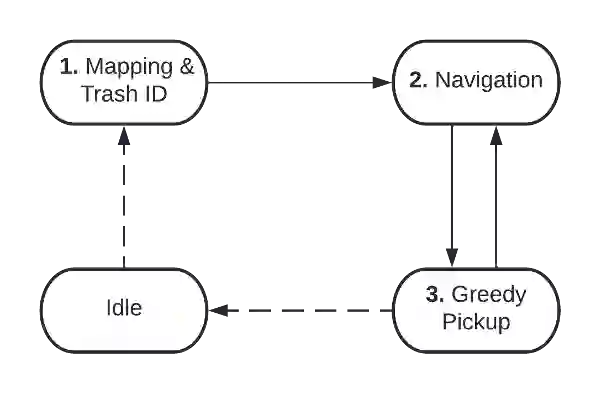
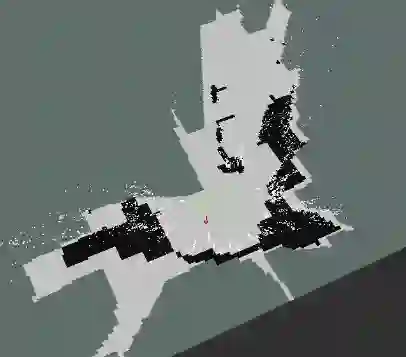
In this paper, we present the first iteration of an error-tolerant, autonomous, multi-robot system that monitors highway road verges and identifies and collects roadside litter. It is designed to use an aerial vehicle that can rapidly cover a vast area and collect data on the road verge. This data is then passed to a ground vehicle that constructs a map of the road verge and uses a trained Convolutional Neural Network (CNN) to identify pieces of litter. After the pieces of litter are identified on the map of the road verge, the ground robot navigates to each piece of trash, re-evaluates the area, and performs a "greedy pickup" procedure. This final stage accounts for any error in the map's construction or the identified trash's location. We found that ending the robotic system's control flow with a greedy pickup procedure can retroactively account for processing errors of the system as it runs. This increases the system's fault tolerance and allows for the use of cheaper equipment since pinpoint accuracy is not always necessary. In this paper, we present the feasibility of this system by testing in simulation and later using real robotic hardware. We show that the system is effective enough to iterate on its design principles to create a more sophisticated system.
翻译:在本文中,我们首次重述了监测公路路边并识别和收集路边垃圾的错误容忍、自主、多机器人系统,用于监测公路路边并识别和收集路边垃圾的偏差、自主、多机器人系统;设计该系统的目的是使用能够迅速覆盖广大地区并收集路边数据的航空飞行器;然后将这些数据传送到能够绘制路边地图并使用训练有素的连锁神经神经网络来识别垃圾的地面飞行器;在路边地图上识别垃圾碎片之后,地面机器人对每块垃圾进行导航,重新评估区域并进行“greedy pick”程序;该程序的设计是使用地图构造中的任何错误或已查明的垃圾位置。 我们发现,用贪婪的回收程序结束机器人系统的控制流动,可以追溯到处理系统运行时的错误。这增加了系统的过错容忍度,并允许使用更廉价的设备,因为准确性要求并不总有必要。 在本文中,我们通过模拟和以后使用更先进的机器人硬件来展示这个系统的可行性。 我们证明这个系统在模拟和随后使用更精密的系统上有足够的设计系统是有效的。