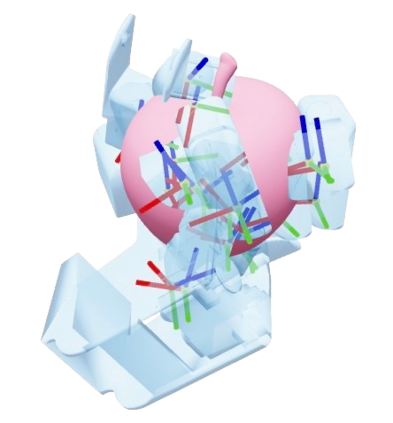
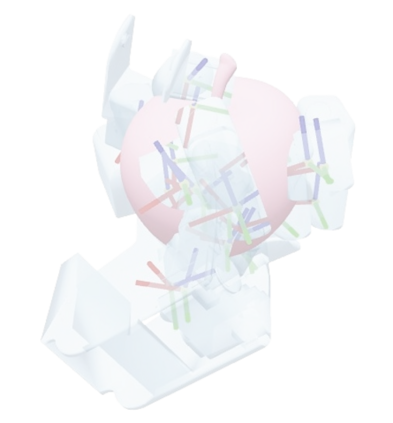
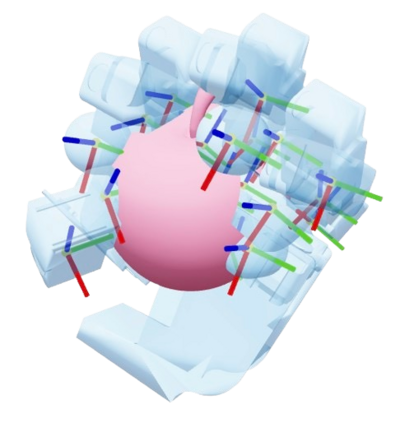
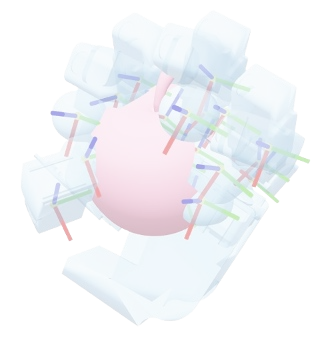
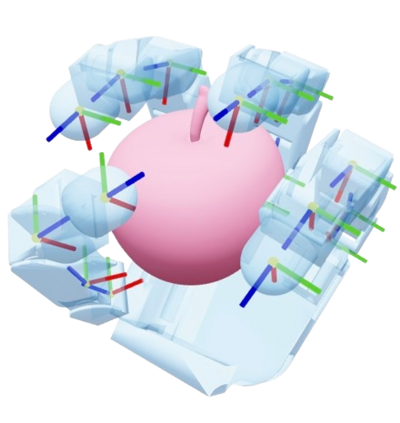
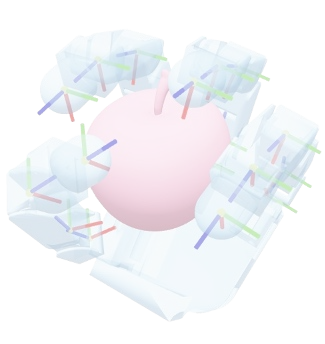
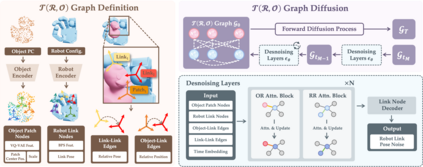
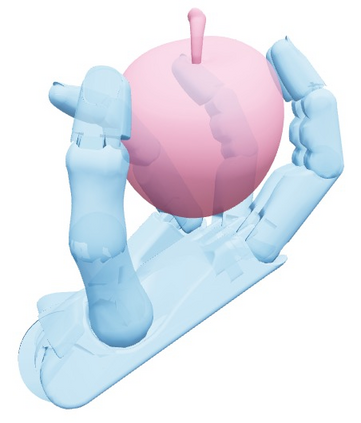
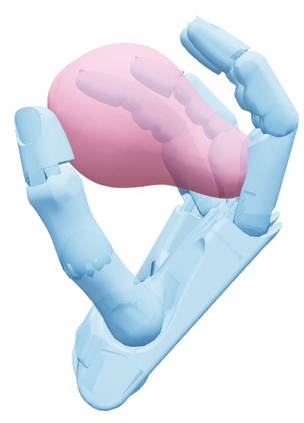
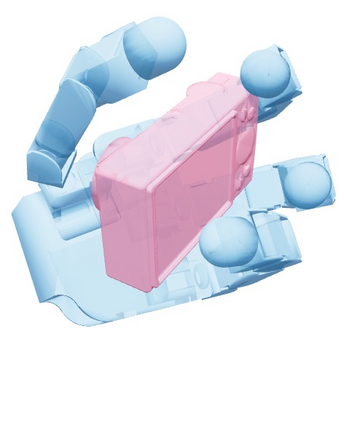
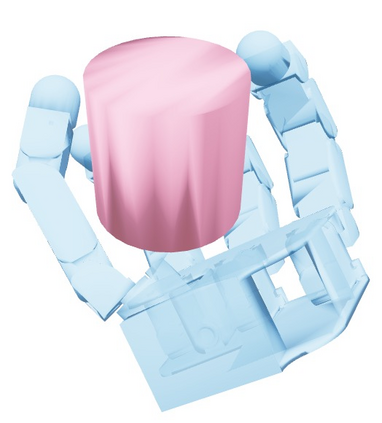
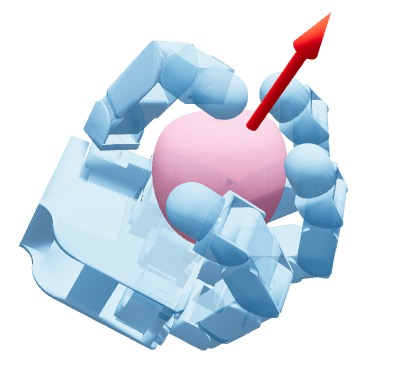
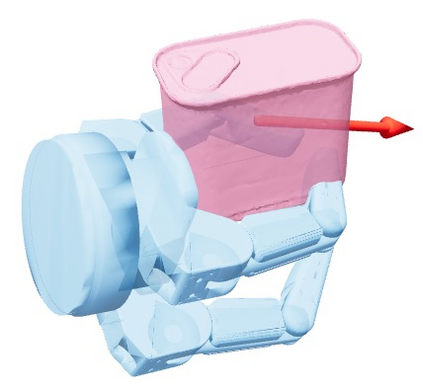
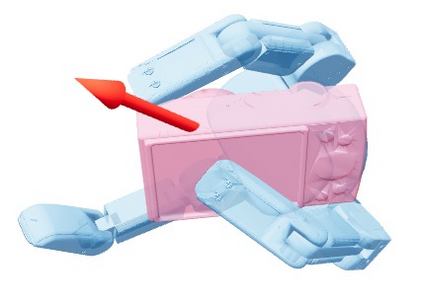
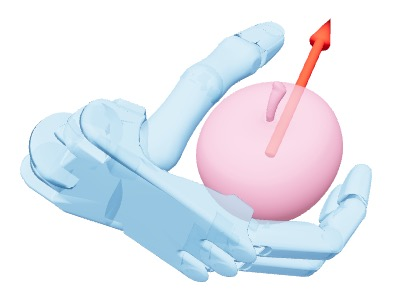
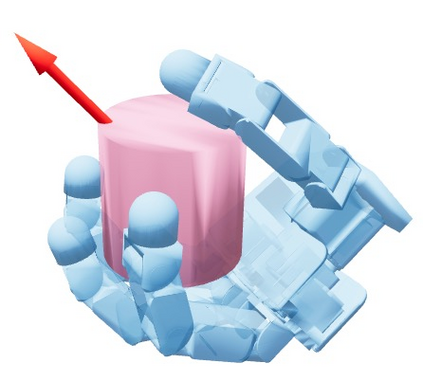
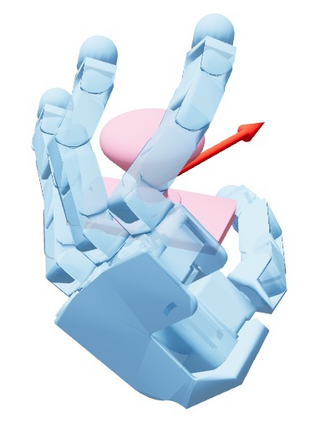
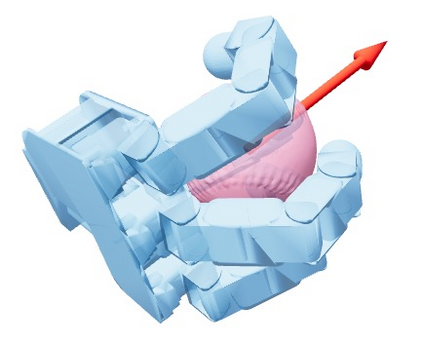
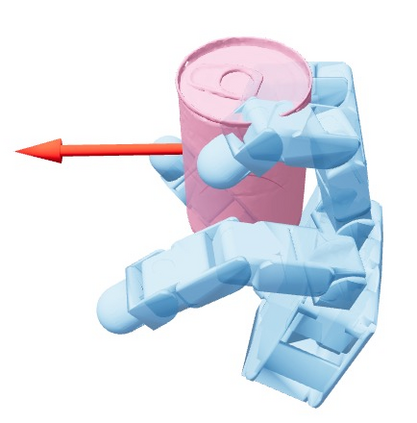
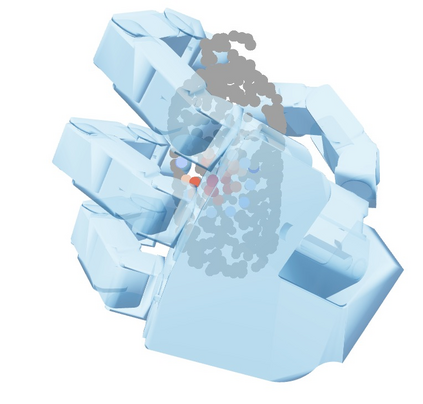
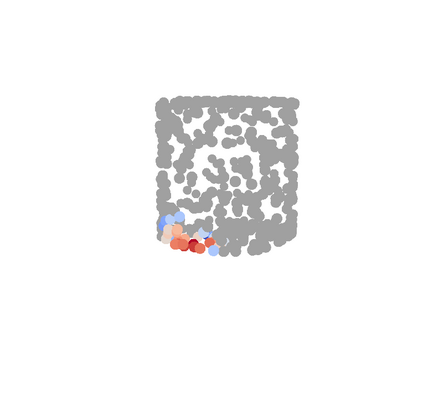
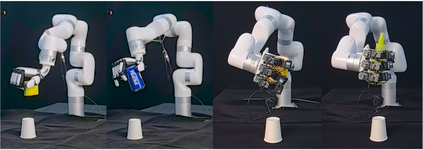
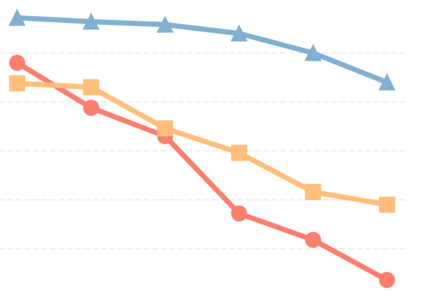
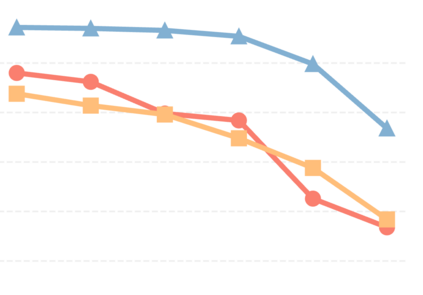
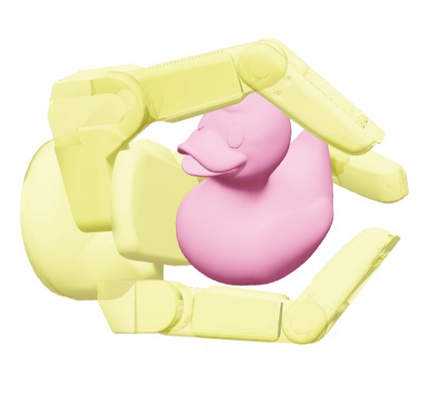
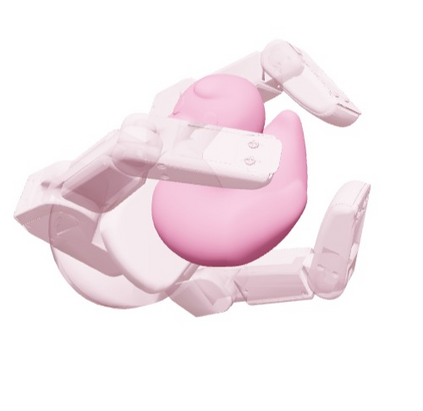
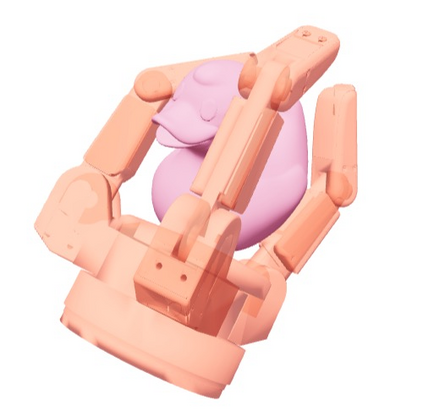
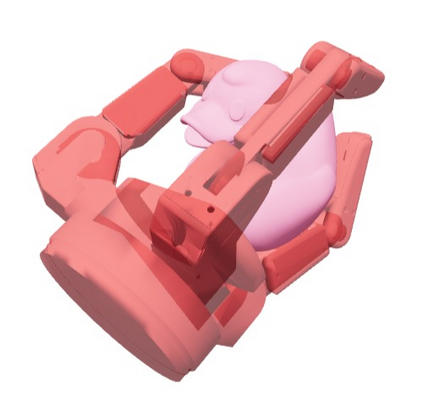
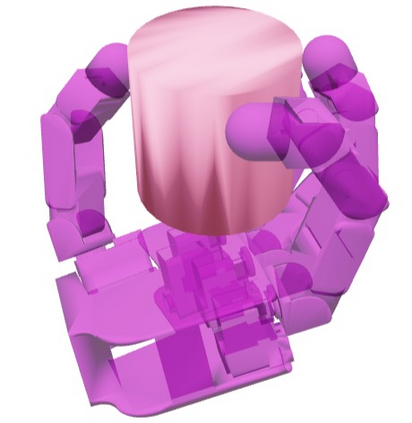
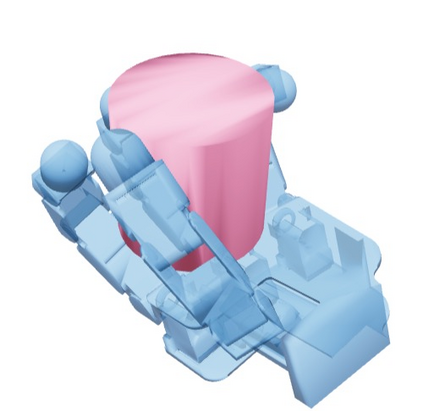
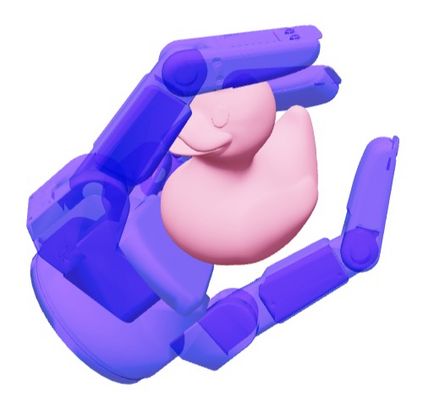
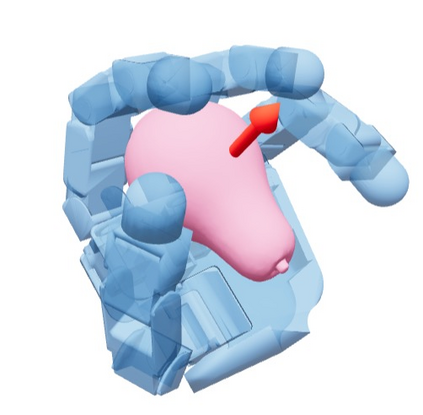
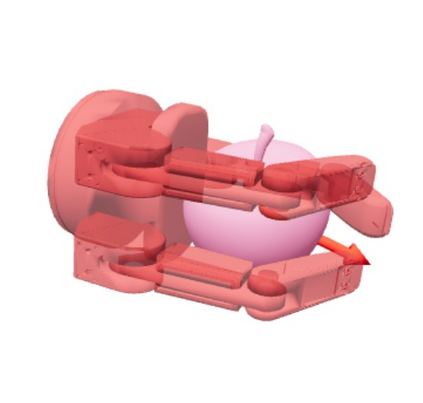
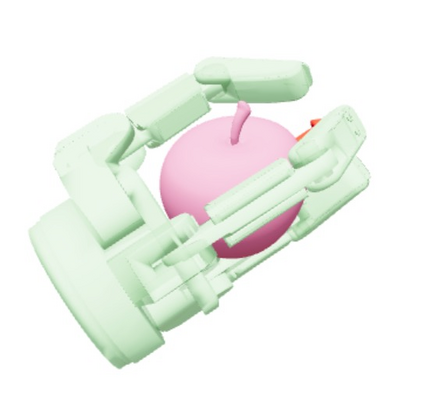
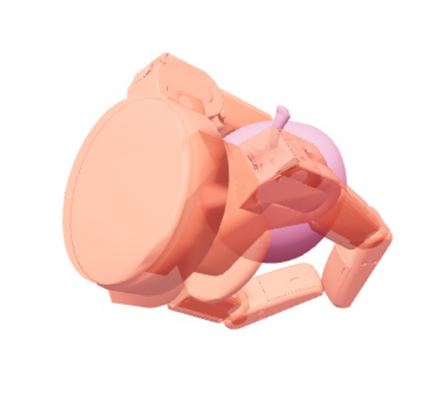
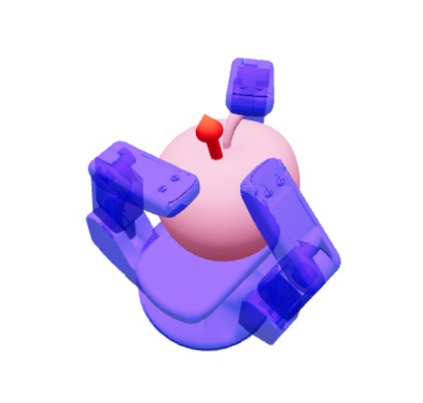
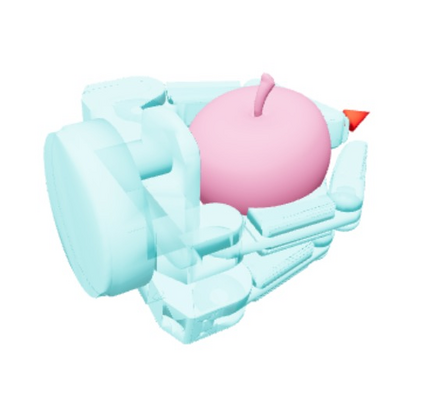
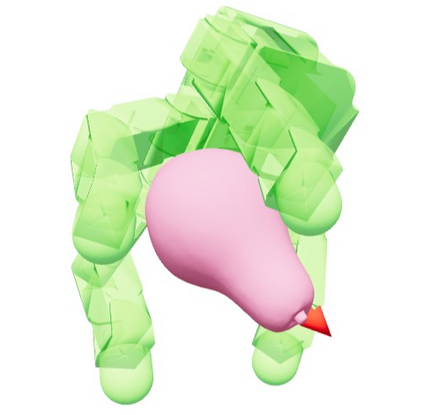
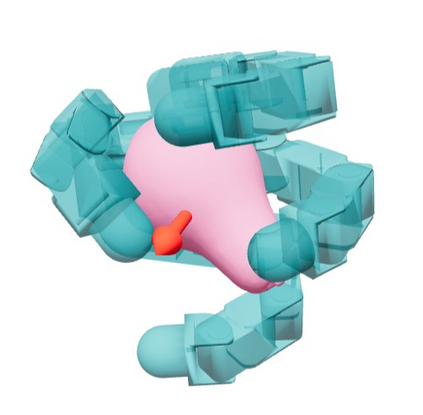
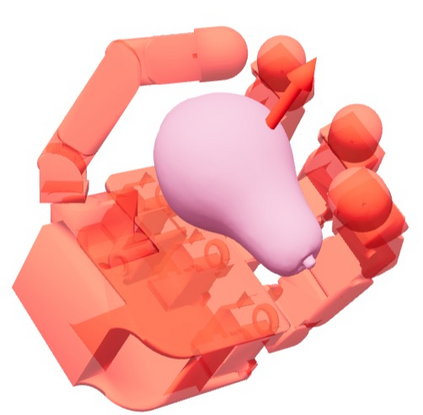
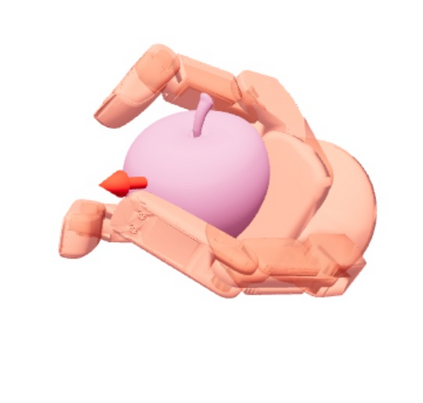
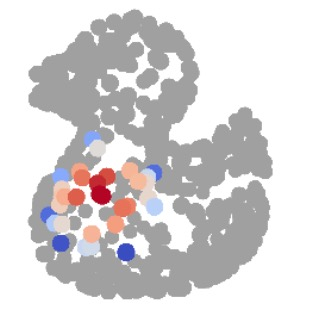
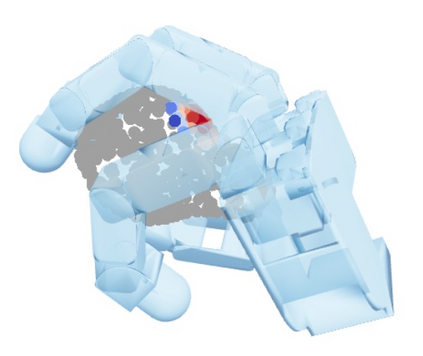
Dexterous grasping remains a central challenge in robotics due to the complexity of its high-dimensional state and action space. We introduce T(R,O) Grasp, a diffusion-based framework that efficiently generates accurate and diverse grasps across multiple robotic hands. At its core is the T(R,O) Graph, a unified representation that models spatial transformations between robotic hands and objects while encoding their geometric properties. A graph diffusion model, coupled with an efficient inverse kinematics solver, supports both unconditioned and conditioned grasp synthesis. Extensive experiments on a diverse set of dexterous hands show that T(R,O) Grasp achieves average success rate of 94.83%, inference speed of 0.21s, and throughput of 41 grasps per second on an NVIDIA A100 40GB GPU, substantially outperforming existing baselines. In addition, our approach is robust and generalizable across embodiments while significantly reducing memory consumption. More importantly, the high inference speed enables closed-loop dexterous manipulation, underscoring the potential of T(R,O) Grasp to scale into a foundation model for dexterous grasping.
翻译:暂无翻译