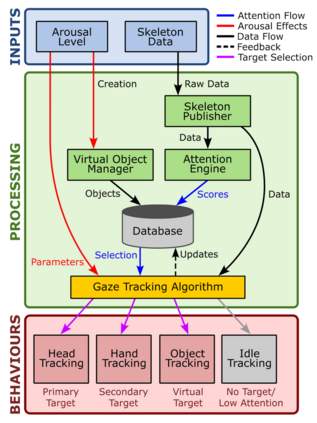
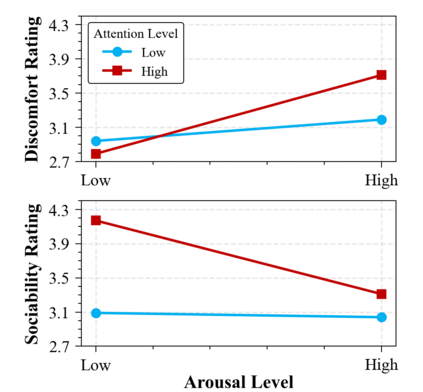
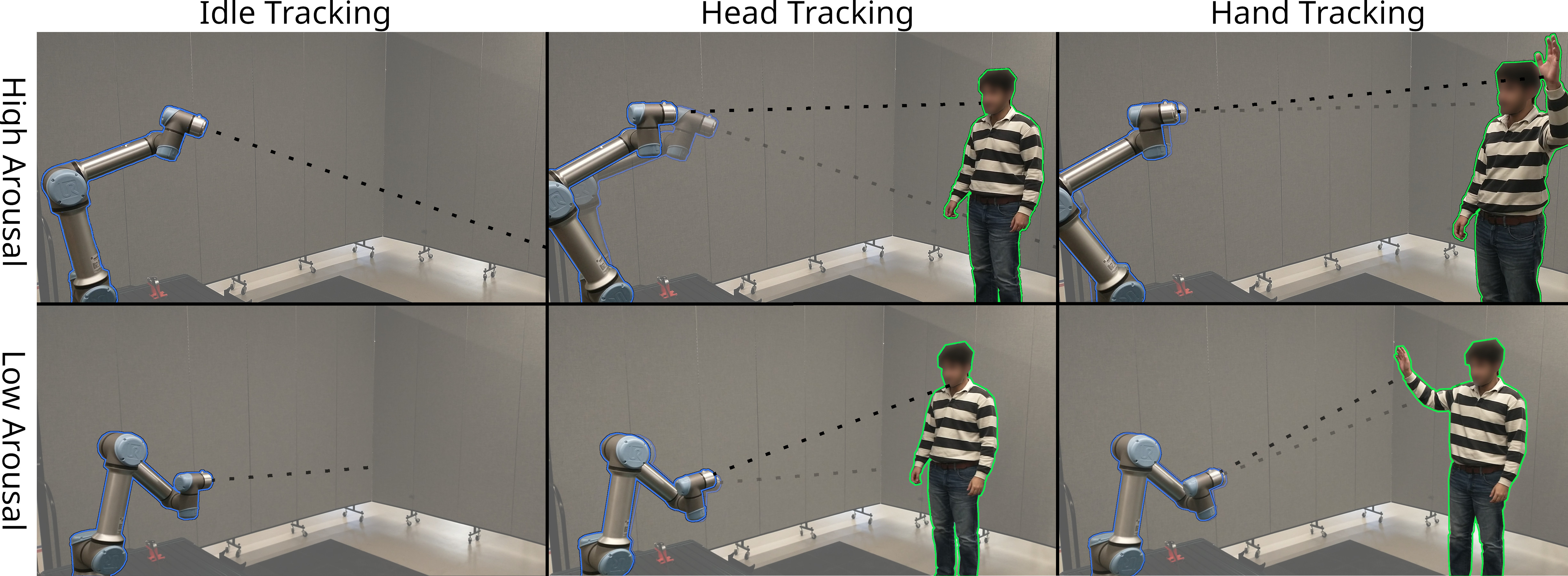
This study explores how human perceptions of a non-anthropomorphic robotic manipulator are shaped by two key dimensions of behaviour: arousal, defined as the robot's movement energy and expressiveness, and attention, defined as the robot's capacity to selectively orient toward and engage with a user. We introduce a novel control architecture that integrates a gaze-like attention engine with an arousal-modulated motion system to generate socially meaningful behaviours. In a user study, we find that robots exhibiting high attention -- actively directing their focus toward users -- are perceived as warmer and more competent, intentional, and lifelike. In contrast, high arousal -- characterized by fast, expansive, and energetic motions -- increases perceptions of discomfort and disturbance. Importantly, a combination of focused attention and moderate arousal yields the highest ratings of trust and sociability, while excessive arousal diminishes social engagement. These findings offer design insights for endowing non-humanoid robots with expressive, intuitive behaviours that support more natural human-robot interaction.
翻译:暂无翻译