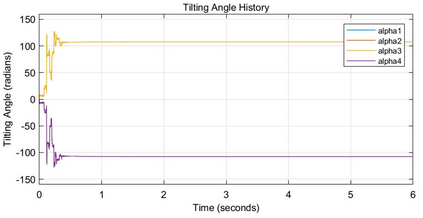
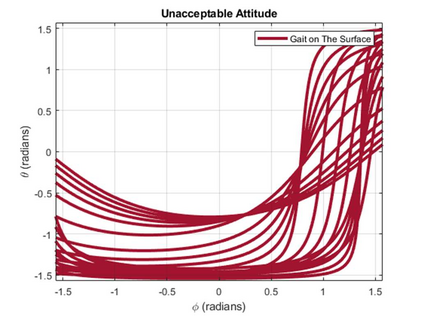
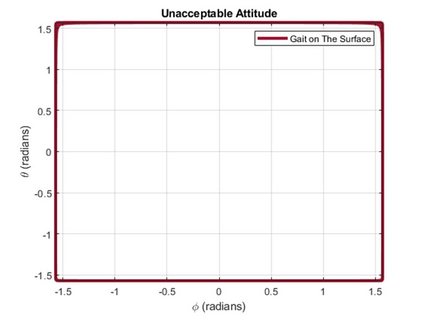
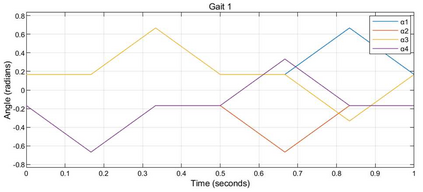
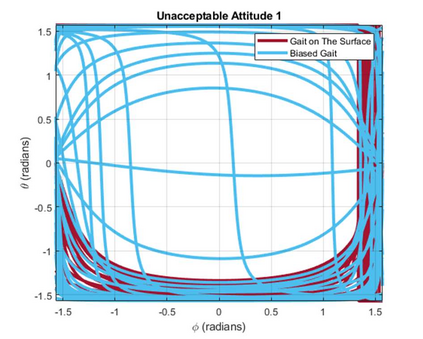
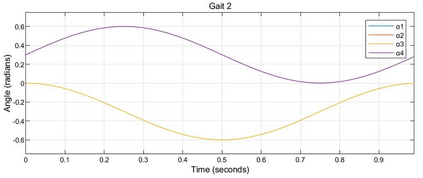
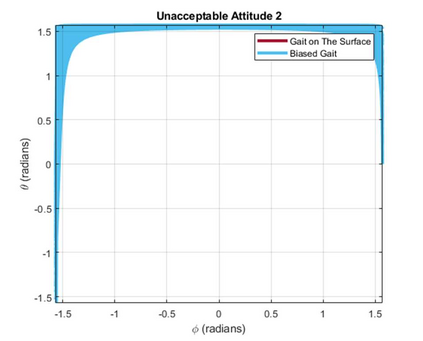
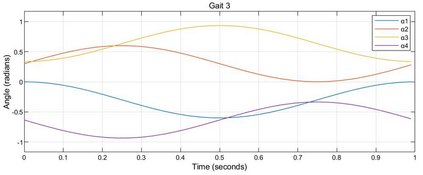
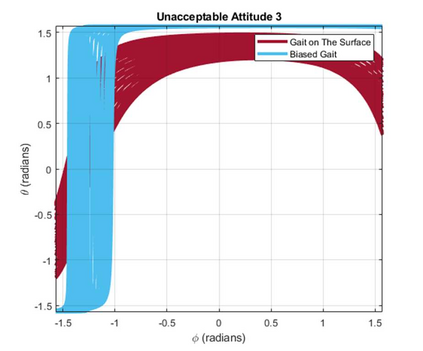
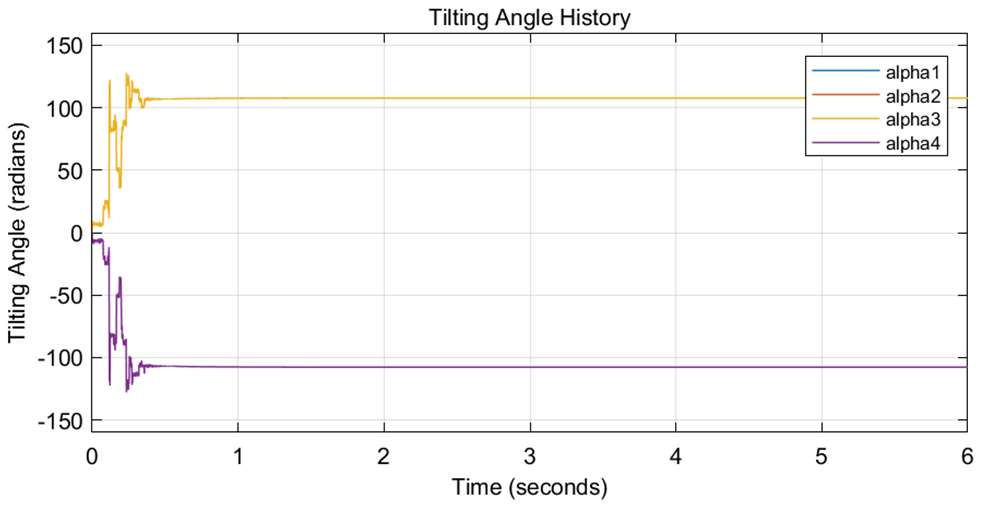
Gait plan is a procedure that is typically applied on the ground robots, e.g., quadrupedal robots; the tilt-rotor, a novel type of quadrotor with eight inputs, is not one of them. While controlling the tilt-rotor relying on feedback linearization, the tilting angles (inputs) are expected to change over-intensively, which may not be expected in the application. To help suppress the intensive change in the tilting angles, a gait plan procedure is introduced to the tilt-rotor before feedback linearization. The tilting angles are specified with time in advance by users rather than given by the control rule. However, based on this scenario, the decoupling matrix in feedback linearization can be singular for some attitudes, combinations of roll angle and pitch angle. It hinders the further application of the feedback linearization. With this concern, Two Color Map Theorem is established to maximize the acceptable attitude region, where the combinations of roll and pitch will give an invertible decoupling matrix. That theorem, however, over-restricts the choice of the tilting angles, which can rule out some feasible robust gaits. This paper gives the generalized Two Color Map Theorem; all the robust gaits can be found based on this generalized theorem. The robustness of three gaits that satisfy this generalized Two Color Map Theorem (while violating Two Color Map Theorem) are analyzed. The results show that Generalized Two Color Map Theorem completes the search for the robust gaits for a tilt-rotor.
翻译:Gait 计划是一个通常在地面机器人上应用的程序,例如四重机器人;倾斜-rotor,一种具有八种输入的新型二次曲线,不是其中的一种。在控制倾斜-rotor时,依赖反馈线性化,倾斜角度(投入)预期会发生超密集的变化,这在应用程序中可能无法预料到。为了帮助抑制倾斜角度的剧烈变化,在反馈线性化之前,向倾斜-rotor引入了轨迹计划程序。倾斜角度由用户提前指定时间,而不是由控制规则给出。然而,根据这个假设,在反馈线性线性矩阵中脱钩的矩阵对于某些态度、滚动角度和倾角的组合来说可能是奇特的。由于这一关注,两个颜色图的建立是为了尽量扩大可接受的姿态区域,在那里滚动和投色的组合将给一个可倒置的完整解码矩阵。 该颜色- 垂直的颜色- 直线性图的颜色值将显示一个双直径直径的直径, 这个直径的直径的直径直径, 将显示整个直径直径的直径直径直径的直径的直径。 。