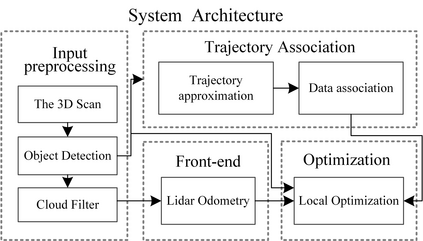
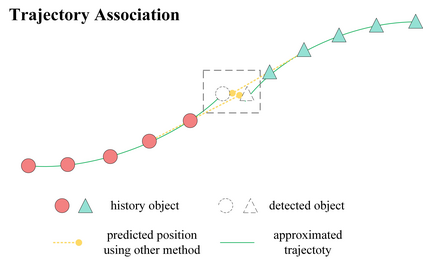
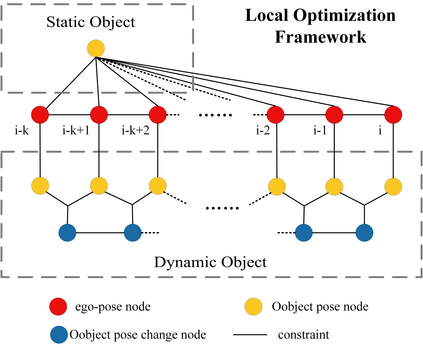
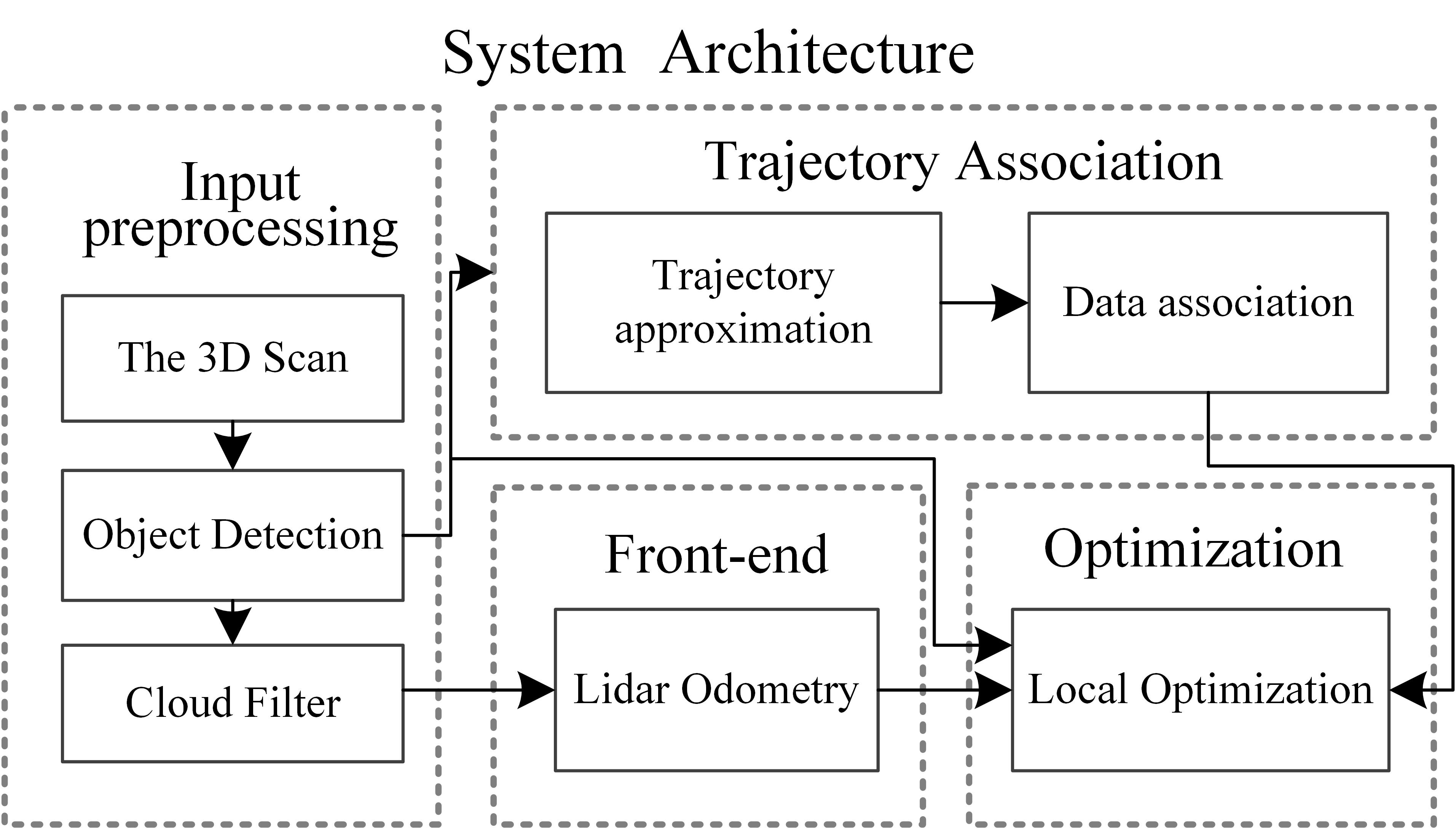
Ego-pose estimation and dynamic object tracking are two key issues in an autonomous driving system. Two assumptions are often made for them, i.e. the static world assumption of simultaneous localization and mapping (SLAM) and the exact ego-pose assumption of object tracking, respectively. However, these assumptions are difficult to hold in highly dynamic road scenarios where SLAM and object tracking become correlated and mutually beneficial. In this paper, DL-SLOT, a dynamic Lidar SLAM and object tracking method is proposed. This method integrates the state estimations of both the ego vehicle and the static and dynamic objects in the environment into a unified optimization framework, to realize SLAM and object tracking (SLOT) simultaneously. Firstly, we implement object detection to remove all the points that belong to potential dynamic objects. Then, LiDAR odometry is conducted using the filtered point cloud. At the same time, detected objects are associated with the history object trajectories based on the time-series information in a sliding window. The states of the static and dynamic objects and ego vehicle in the sliding window are integrated into a unified local optimization framework. We perform SLAM and object tracking simultaneously in this framework, which significantly improves the robustness and accuracy of SLAM in highly dynamic road scenarios and the accuracy of objects' states estimation. Experiments on public datasets have shown that our method achieves better accuracy than A-LOAM.
翻译:在自主驱动系统中,对目标的估算和动态物体跟踪是两个关键问题。通常有两种假设,即静态的世界假设,即同时进行定位和绘图(SLAM)和物体跟踪(SLOT),以及精确的自我定位假设,但是,在高度动态的道路假设中,很难维持这些假设,即SLAM和物体跟踪是相互联系和互利的。在本文中,提出了动态LL-SLOT、动态Lidar SLAM和物体跟踪方法。这种方法将自我驱动飞行器以及环境中静态和动态物体的状态估计纳入统一的优化框架,以便同时实现SLAM和物体跟踪(SLOT)。首先,我们进行物体探测,以删除属于潜在动态物体的所有点。然后,LIDARodo测量工作使用过滤点云进行。同时,根据时间序列信息,在滑动窗口中,被检测到的物体与历史对象轨迹相连。滑动物体和自动飞行器的状态被纳入统一的本地优化框架,以便同时实现SLAM和物体跟踪。我们同时在快速的精确度上,我们用SLAM和物体的精确度同时展示了我们的数据。我们用高精确度,在实验模型中,从而显示了公共的精确度。