
基于纯视觉的三维目标检测是现阶段自动驾驶系统中的重要感知技术,为下游模块提供周围环境中物体的位置和类别信息,在学术界和工业界都受到广泛的关注。该方法大幅提高了检测性能,有希望推动纯视觉方法的应用落地。
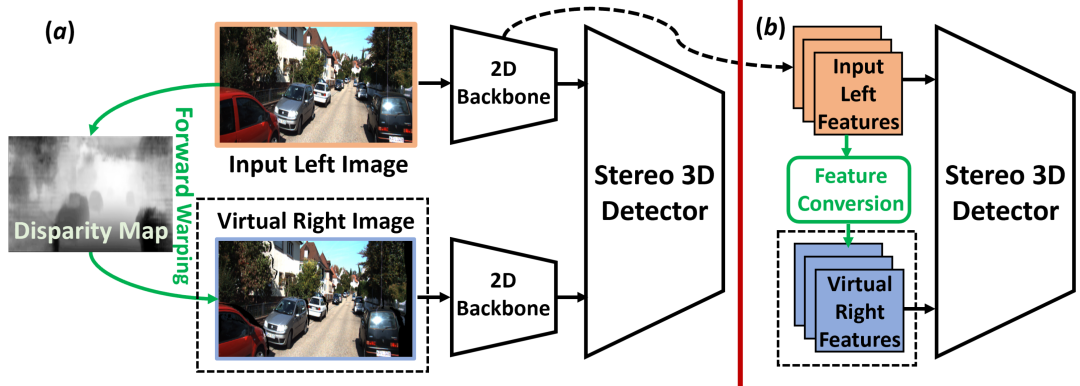
该项研究提出了一种伪双目三维目标检测框架,并通过两种方式生成伪双目视角完成三维目标检测任务:(1)在图像层面利用左图和预估视差图生成虚拟右图;(2)在特征层面利用左图特征和预估视差特征生成虚拟右特征,与图像层面相比,该方式显著提高了生成速度**(0.0017s V.S. 1.8454s)**。在CVPR 2022截至投稿前,该方法在广泛使用的KITTI自动驾驶单目图像三维目标检测公开排行榜上在所有类别的检测性能上均排名第一。
https://www.zhuanzhi.ai/paper/3e54d98cd3799503389c0876bae65b11
成为VIP会员查看完整内容
相关内容

专知会员服务
38+阅读 · 2020年3月23日
专知会员服务
32+阅读 · 2019年11月28日
Arxiv
2+阅读 · 2022年4月19日
Arxiv
0+阅读 · 2022年4月18日
Arxiv
0+阅读 · 2022年4月17日


相关VIP内容
专知会员服务
38+阅读 · 2020年3月23日
专知会员服务
32+阅读 · 2019年11月28日
相关资讯
相关论文
Arxiv
2+阅读 · 2022年4月19日
Arxiv
0+阅读 · 2022年4月18日
Arxiv
0+阅读 · 2022年4月17日