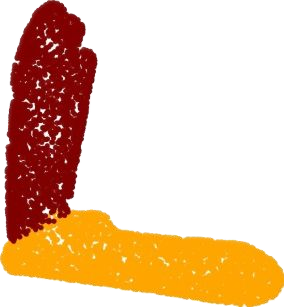
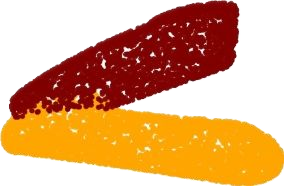
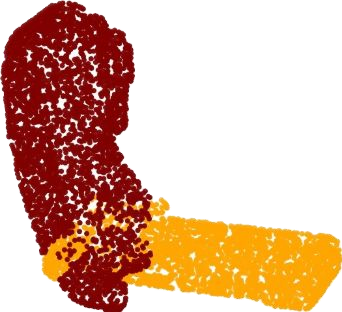
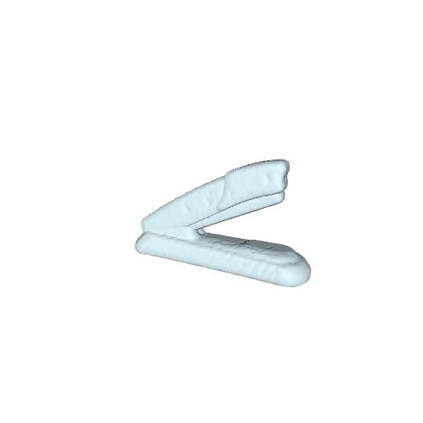
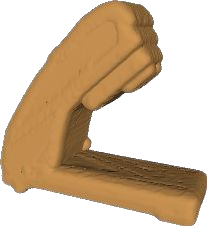
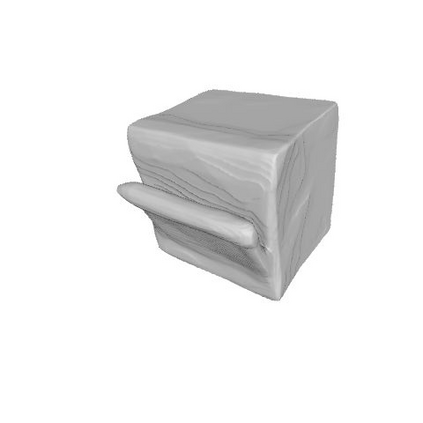
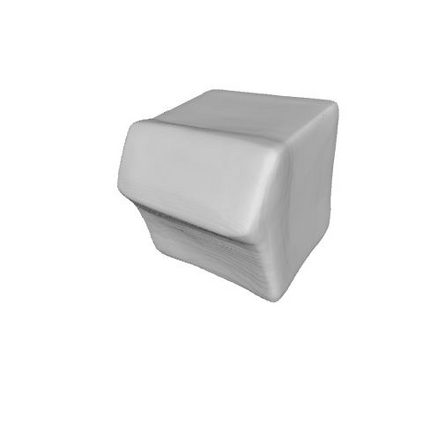
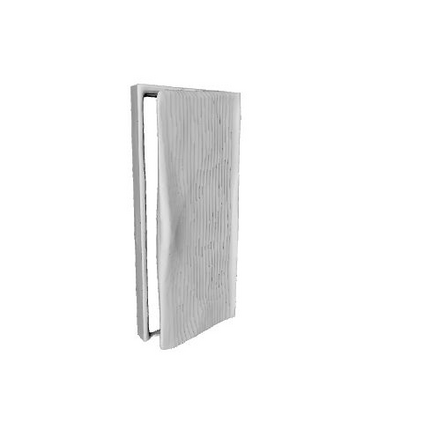
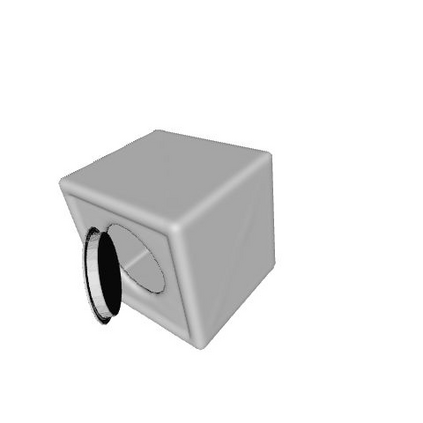
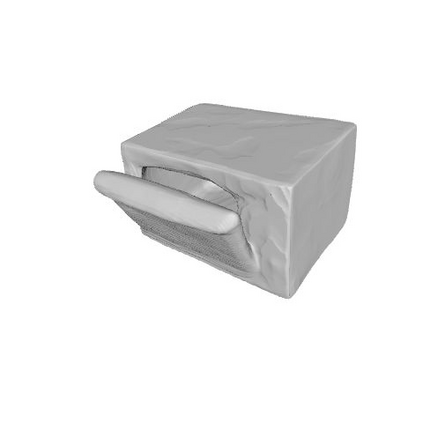
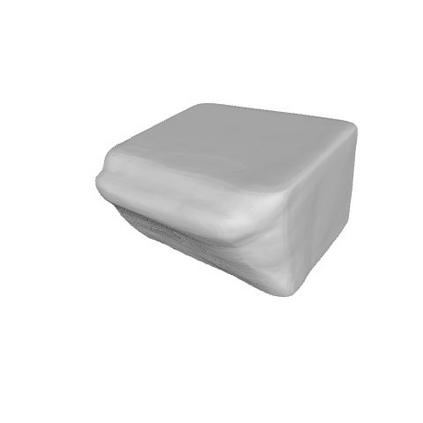
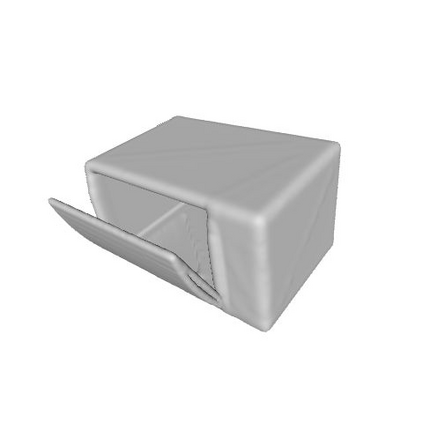
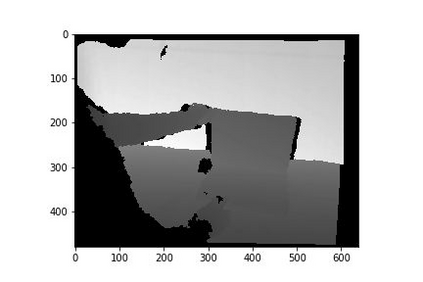
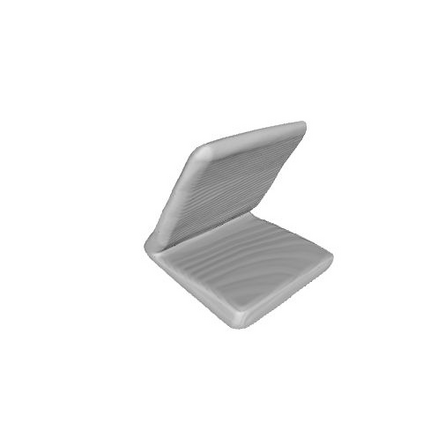
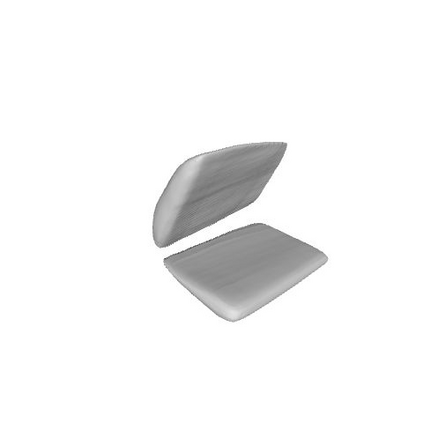
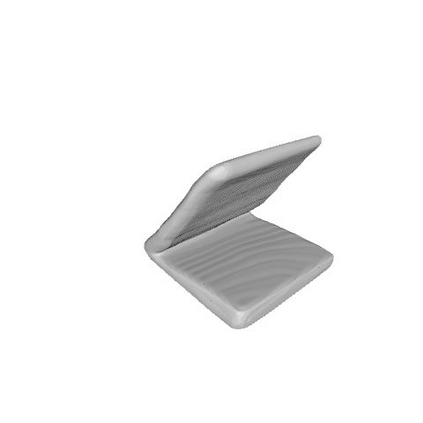
Recent work has made significant progress on using implicit functions, as a continuous representation for 3D rigid object shape reconstruction. However, much less effort has been devoted to modeling general articulated objects. Compared to rigid objects, articulated objects have higher degrees of freedom, which makes it hard to generalize to unseen shapes. To deal with the large shape variance, we introduce Articulated Signed Distance Functions (A-SDF) to represent articulated shapes with a disentangled latent space, where we have separate codes for encoding shape and articulation. We assume no prior knowledge on part geometry, articulation status, joint type, joint axis, and joint location. With this disentangled continuous representation, we demonstrate that we can control the articulation input and animate unseen instances with unseen joint angles. Furthermore, we propose a Test-Time Adaptation inference algorithm to adjust our model during inference. We demonstrate our model generalize well to out-of-distribution and unseen data, e.g., partial point clouds and real-world depth images.
翻译:最近的工作在使用隐含功能方面取得了显著进展,作为3D 刻板物体形状重建的连续代号。然而,花在模拟普通表达式物体上的努力要少得多。 与僵硬物体相比, 显式物体具有较高程度的自由度, 这使得它难以被概括为看不见的形状。 为了处理巨大的形状差异, 我们引入了人工连接的距离函数( A- SDF), 以代表一个分解的隐形空间的显形形状。 在那里,我们拥有不同的编码形状和表达代码。 我们假定我们没有关于部分几何学、 表达状态、 联合类型、 联合轴和联合位置的先前知识。 有了这种分解的连续代号, 我们证明我们可以控制朗式输入, 并且用看不见的共同角度对不可见的隐形事件进行反射。 此外, 我们提出一个测试时间的推论算法, 以调整我们的模型。 我们展示出出出超出分布式和不可见的数据, 比如, 部分点云和现实世界深度图像。